
大型工件在数控镗铣中心上自动找正中心方法探讨.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

大型工件在数控镗铣中心上自动找正中心方法探讨.docx
大型工件在数控镗铣中心上自动找正中心方法探讨标题:大型工件在数控镗铣中心上自动找正中心方法探讨摘要:自动找正中心是大型工件在数控镗铣中心加工过程中的重要环节,对于提高加工精度、降低准备工作和减少人工干预具有重要意义。本论文将详细讨论大型工件在数控镗铣中心上自动找正中心的方法,包括视觉系统、传感器系统和算法设计。通过对比分析不同方法的优缺点,提出了一种综合考虑各方面因素的自动找正中心方法。一、引言随着制造业的发展,大型工件在数控镗铣中心上的加工需求越来越高。但是,由于大型工件的尺寸较大、重量较重等特点,使得

复合式镗铣加工中心箱体零件原点找正方法.docx
复合式镗铣加工中心箱体零件原点找正方法复合式镗铣加工中心箱体零件原点找正方法摘要:复合式镗铣加工中心是当前许多制造行业中非常常用的一种机床,其多功能性和高准确度能够满足许多工件的加工需要。但是,在实际工作中,处理好箱体等大尺寸零件的原点找正一直是工人们头痛的问题。本文介绍了几种原点找正方法,并详细介绍了对于箱体等大尺寸零件,基于固定的夹具位置,使用修正补偿值进行坐标系修正的方法。关键词:复合式镗铣加工中心,箱体零件,原点找正,夹具位置,修正补偿值一、引言复合式镗铣加工中心是一种广泛应用于制造行业的机床。该
数控镗铣及加工中心加工工艺习题库.pdf
第5单元数控镗铣及加工中心加工工艺习题库一、问答题1、数控铣床的类型有哪些?其用途如何?2、数控铣削的主要加工对象有哪些?其特点是什么?3、在数控铣削加工中,选择定位基准应遵循的原则有哪些?4、加工中心有哪些类型?5、立式加工中心适合加工什么样的零件?6、加工中心加工选择定位基准的要求有哪些?应遵循的原则是什么?7、加工中心与数控鏜铣床有什么异同些用刀具?9、立式数控铣床和卧式数控铣床分别适合加工什么样的零件?10、如何确定对刀点?选择对刀点的原则是什么?11、加工中心上孔的加工方案如何确定?进给路线应如

大型回转件数控镗铣机加工方法.docx
大型回转件数控镗铣机加工方法大型回转件数控镗铣机加工方法摘要:随着工业化的不断发展,机械加工行业日益重要。大型回转件数控镗铣机作为一种重要的加工设备,其加工方法与工艺对于提高加工效率和质量具有关键性作用。本论文将重点介绍大型回转件数控镗铣机的加工方法,包括工艺规划、切削参数选择和刀具路径生成等方面,旨在为相关行业提供参考与借鉴。一、引言随着现代工业的快速发展,大型回转件作为机械加工行业中的重要组成部分,广泛应用于能源、化工、航空、航天和交通等领域。而大型回转件数控镗铣机作为一种重要的加工设备,具备高精度、
大型龙门立式数控镗铣机床.pdf
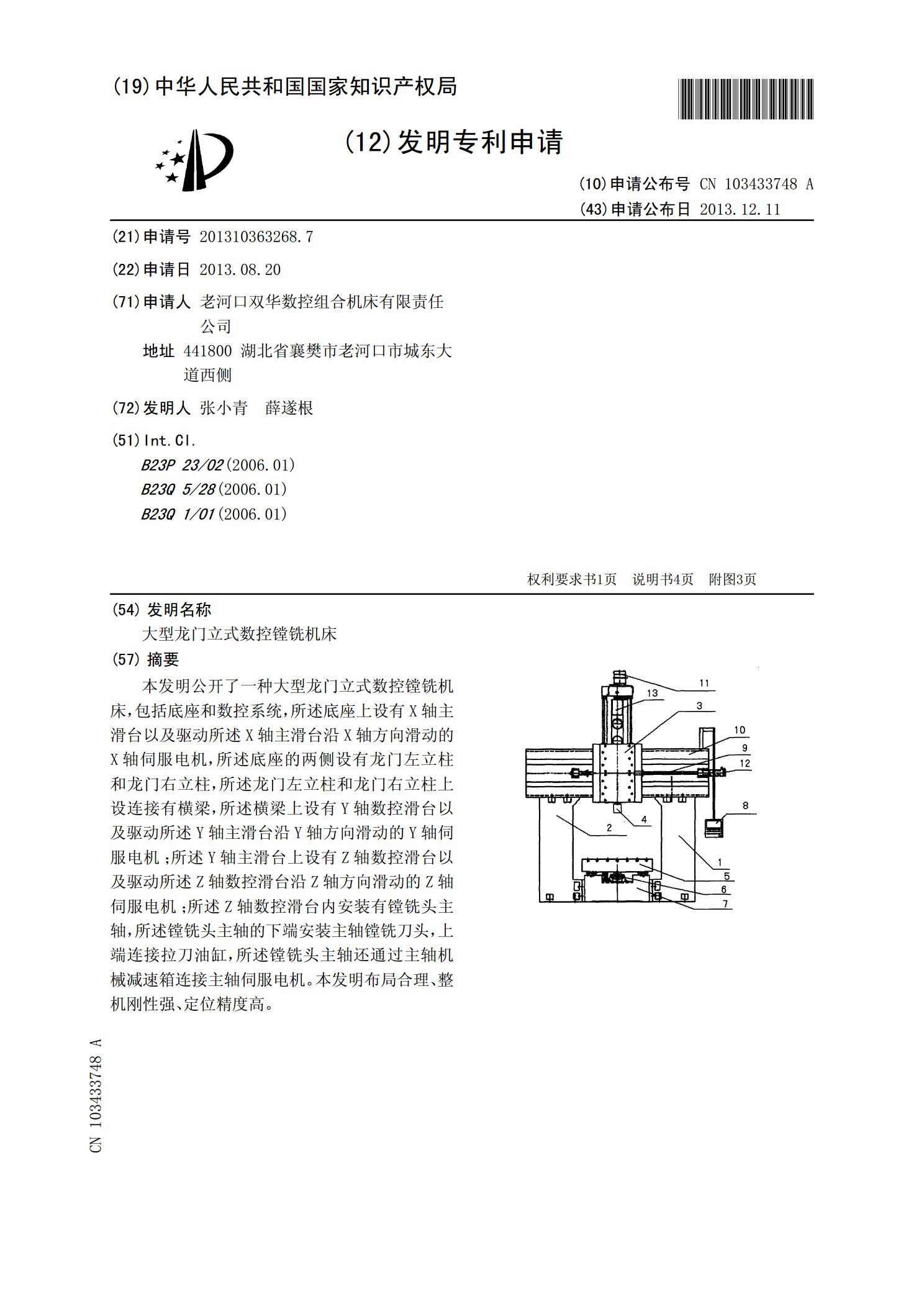
本发明公开了一种大型龙门立式数控镗铣机床,包括底座和数控系统,所述底座上设有X轴主滑台以及驱动所述X轴主滑台沿X轴方向滑动的X轴伺服电机,所述底座的两侧设有龙门左立柱和龙门右立柱,所述龙门左立柱和龙门右立柱上设连接有横梁,所述横梁上设有Y轴数控滑台以及驱动所述Y轴主滑台沿Y轴方向滑动的Y轴伺服电机;所述Y轴主滑台上设有Z轴数控滑台以及驱动所述Z轴数控滑台沿Z轴方向滑动的Z轴伺服电机;所述Z轴数控滑台内安装有镗铣头主轴,所述镗铣头主轴的下端安装主轴镗铣刀头,上端连接拉刀油缸,所述镗铣头主轴还通过主轴机械减速