
基于视觉检测的机器人分拣系统及其远程监控的设计.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于视觉检测的机器人分拣系统及其远程监控的设计.docx
基于视觉检测的机器人分拣系统及其远程监控的设计标题:基于视觉检测的机器人分拣系统及其远程监控的设计摘要:随着物流、仓储行业的迅猛发展,提高分拣效率和准确度成为企业迫切面临的问题。为了解决人工分拣效率低下的问题,本文提出了一种基于视觉检测的机器人分拣系统及其远程监控设计。该系统能够通过图像处理和机器学习技术完成物品识别和分拣任务,并通过远程监控实现对机器人运行状态的实时监控和管理。实验结果表明,该系统在提高分拣效率和准确度的同时,还具有较高的稳定性和可靠性。关键词:视觉检测,机器人分拣系统,远程监控,图像处

基于机器视觉的机器人分拣系统的设计与实现.docx
基于机器视觉的机器人分拣系统的设计与实现自动化分拣系统在物流行业中有着广泛的应用,可以提高工作效率和准确度。基于机器视觉的机器人分拣系统是一种先进的技术,可以根据物体的形状、颜色、大小等特征来实现快速、准确的分拣。本文将讨论该系统的设计和实现。一、引言随着物流业的快速发展和电子商务的兴起,传统的分拣方法已经无法满足需求。传统的人工分拣存在着效率低、错误率高等问题。因此,开发一种基于机器视觉的机器人分拣系统成为一个重要的研究方向。二、系统设计1.硬件组成基于机器视觉的机器人分拣系统主要由以下硬件组成:-图像
基于视觉的移动分拣机器人及其分拣方法.pdf
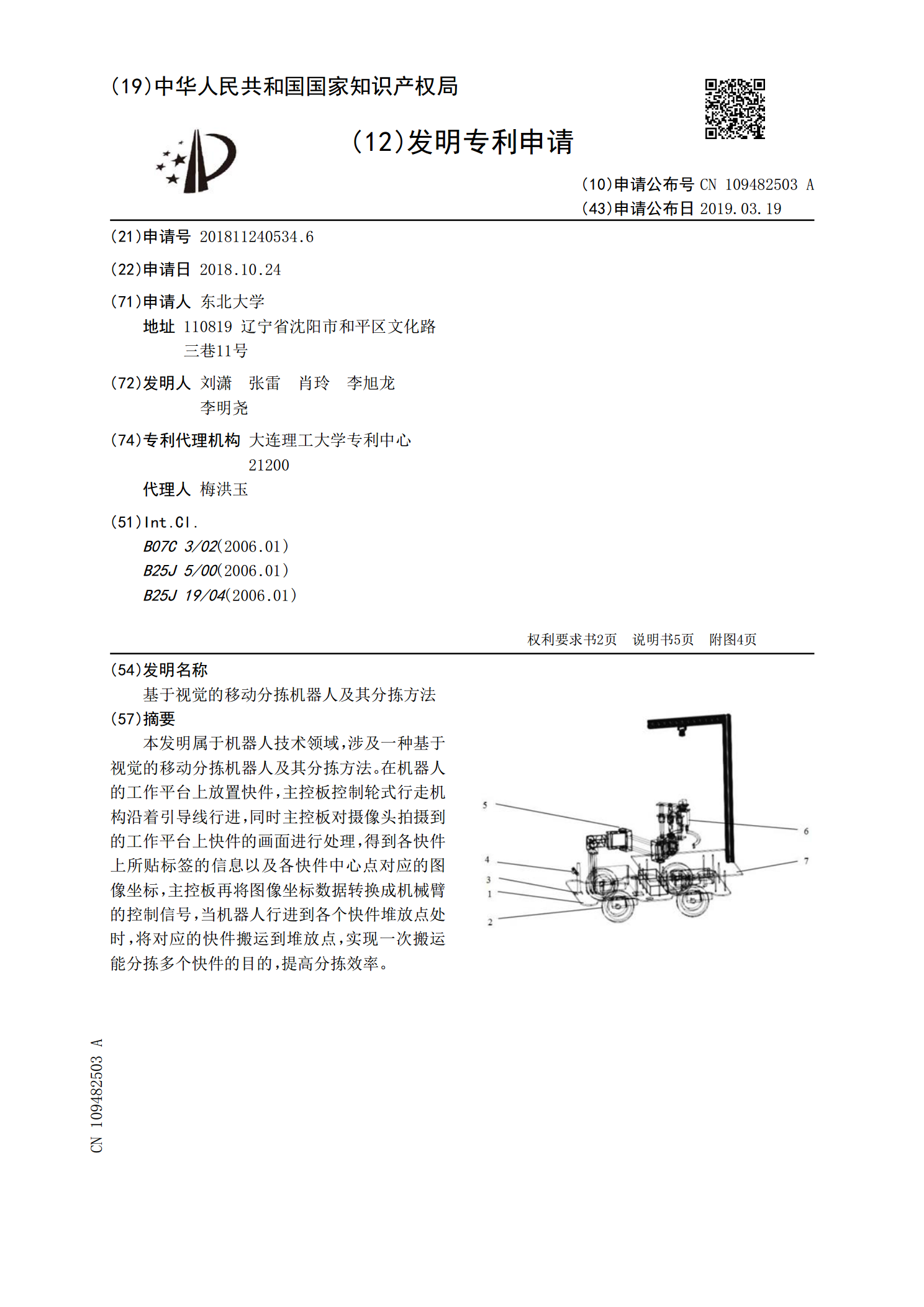
本发明属于机器人技术领域,涉及一种基于视觉的移动分拣机器人及其分拣方法。在机器人的工作平台上放置快件,主控板控制轮式行走机构沿着引导线行进,同时主控板对摄像头拍摄到的工作平台上快件的画面进行处理,得到各快件上所贴标签的信息以及各快件中心点对应的图像坐标,主控板再将图像坐标数据转换成机械臂的控制信号,当机器人行进到各个快件堆放点处时,将对应的快件搬运到堆放点,实现一次搬运能分拣多个快件的目的,提高分拣效率。

基于机器视觉的工业机器人智能分拣系统设计.docx
基于机器视觉的工业机器人智能分拣系统设计基于机器视觉的工业机器人智能分拣系统设计摘要:随着制造业的发展,自动化生产已成为工业界追求的方向之一。工业机器人在生产线上的应用越来越广泛,为了提高生产效率和质量,需要设计一种智能分拣系统。本论文提出了一种基于机器视觉的工业机器人智能分拣系统设计方案。该系统利用机器视觉技术进行产品的识别和分类,并通过工业机器人进行自动化的分拣操作。实验证明,该系统可以有效地提高分拣效率和准确性。关键词:机器视觉;工业机器人;智能分拣1.引言自动化生产在制造业中扮演着越来越重要的角色

基于机器视觉的Delta机器人分拣与跟踪系统设计.pptx
基于机器视觉的Delta机器人分拣与跟踪系统设计01添加章节标题Delta机器人分拣系统概述Delta机器人分拣系统的定义Delta机器人分拣系统的应用场景Delta机器人分拣系统的优势机器视觉技术介绍机器视觉技术的基本概念机器视觉技术的应用领域机器视觉技术的优势基于机器视觉的Delta机器人分拣系统设计系统架构设计硬件设备选型与配置软件算法设计与实现系统测试与优化Delta机器人跟踪系统设计跟踪系统概述跟踪系统硬件设备选型与配置跟踪系统软件算法设计与实现跟踪系统测试与优化Delta机器人分拣与跟踪系统集