
基于监督式学习的全景相机与激光雷达的联合标定.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于监督式学习的全景相机与激光雷达的联合标定.docx
基于监督式学习的全景相机与激光雷达的联合标定基于监督式学习的全景相机与激光雷达的联合标定摘要:现代自动驾驶系统依赖于多种传感器,如摄像机和激光雷达,来感知周围环境。准确标定这些传感器之间的相对位置和姿态对于确保可靠的环境感知至关重要。本论文提出了一种基于监督式学习的全景相机与激光雷达的联合标定方法。该方法结合了深度学习和传统的几何计算技术,并通过利用已知的标定数据集进行监督学习,以实现高精度的标定结果。实验结果表明,所提出的方法在标定精度和稳定性方面具有显著优势,对于实现精确的环境感知具有重要意义。1.引

基于圆形标定板的激光雷达与相机联合标定方法和装置.pdf
本申请公开了基于圆形标定板的激光雷达与相机联合标定方法、装置及存储介质,方法包括:通过激光雷达和相机对圆形标定板进行数据采集,分别获得激光雷达的点云数据和相机数据;对相机数据进行处理,得到特征点在相机坐标系中的位置信息;对点云数据进行处理,通过特征点得到圆形标定板的圆面所在平面的空间方程以及拟合过圆心的垂线方程,并联立垂线方程与平面的空间方程求解,得到激光雷达坐标系中的位置信息;将相机坐标系中的位置信息与激光雷达坐标系中的位置信息作对比,保留符合圆形标定板的半径要求的特征点,从而完成标定。本申请可以有效的
基于多相机、多激光雷达的联合标定及目标融合检测方法.pdf
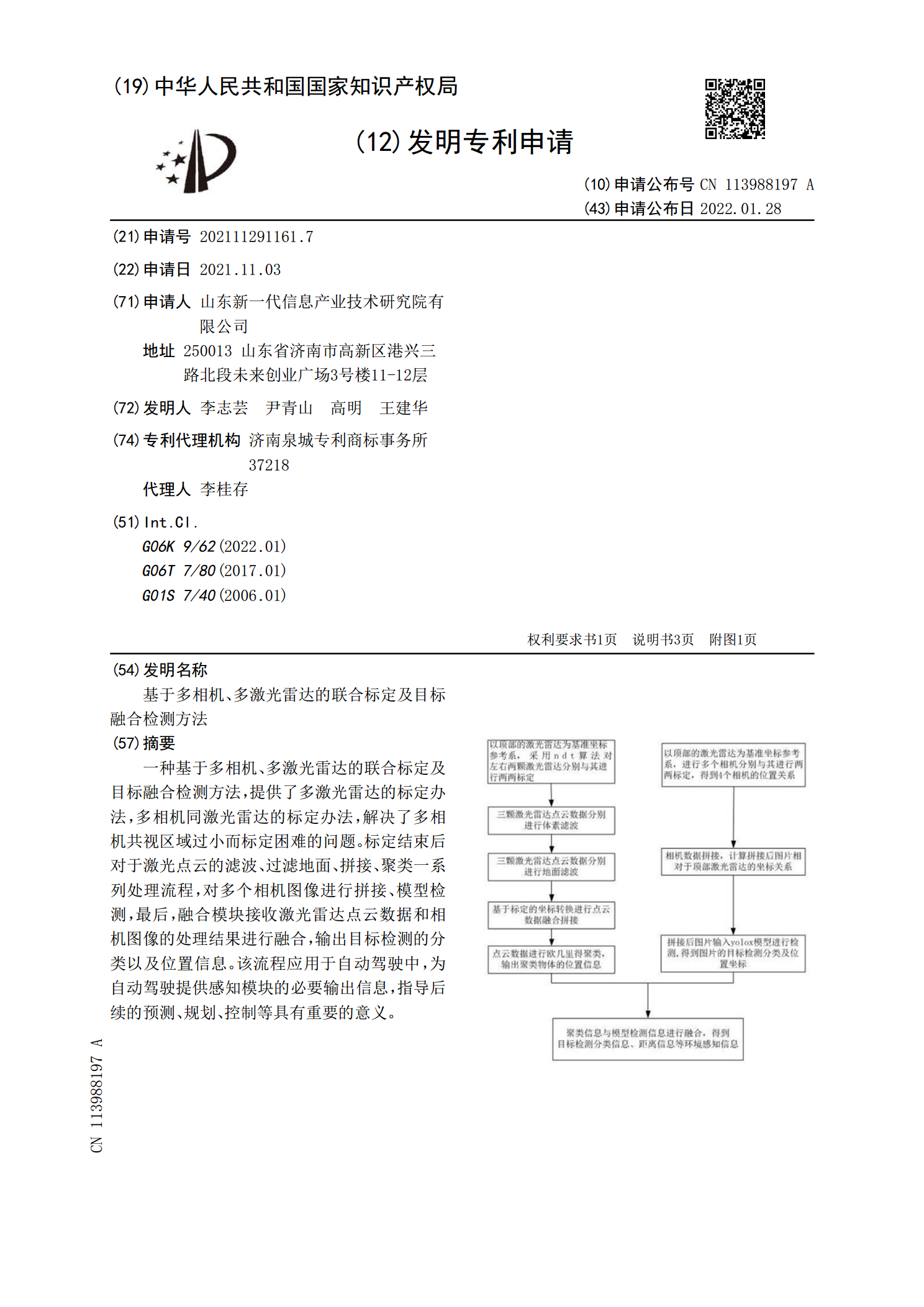
一种基于多相机、多激光雷达的联合标定及目标融合检测方法,提供了多激光雷达的标定办法,多相机同激光雷达的标定办法,解决了多相机共视区域过小而标定困难的问题。标定结束后对于激光点云的滤波、过滤地面、拼接、聚类一系列处理流程,对多个相机图像进行拼接、模型检测,最后,融合模块接收激光雷达点云数据和相机图像的处理结果进行融合,输出目标检测的分类以及位置信息。该流程应用于自动驾驶中,为自动驾驶提供感知模块的必要输出信息,指导后续的预测、规划、控制等具有重要的意义。
激光雷达与相机联合外参标定系统及方法.pdf
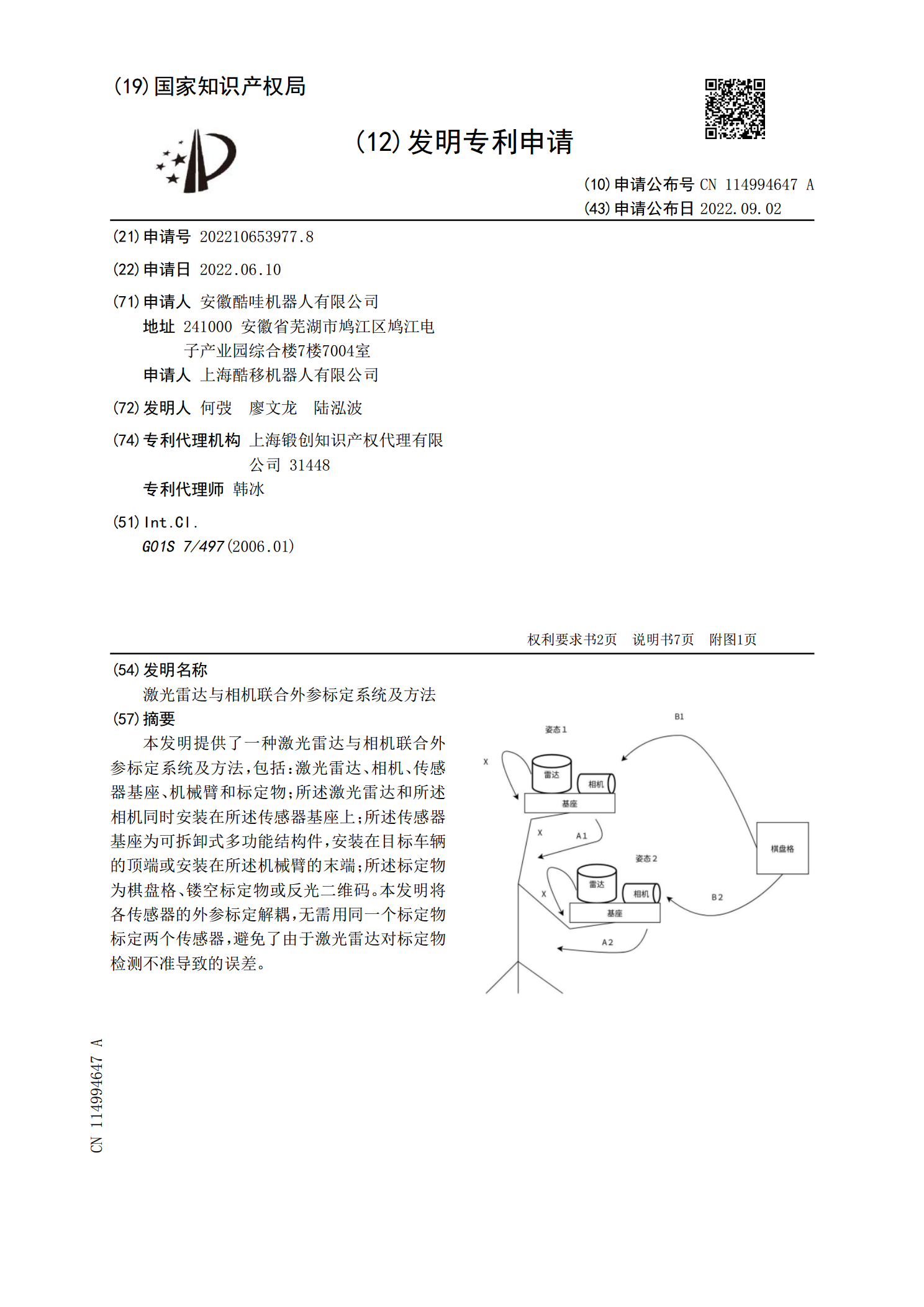
本发明提供了一种激光雷达与相机联合外参标定系统及方法,包括:激光雷达、相机、传感器基座、机械臂和标定物;所述激光雷达和所述相机同时安装在所述传感器基座上;所述传感器基座为可拆卸式多功能结构件,安装在目标车辆的顶端或安装在所述机械臂的末端;所述标定物为棋盘格、镂空标定物或反光二维码。本发明将各传感器的外参标定解耦,无需用同一个标定物标定两个传感器,避免了由于激光雷达对标定物检测不准导致的误差。
毫米波雷达、激光雷达与相机联合标定方法和装置.pdf
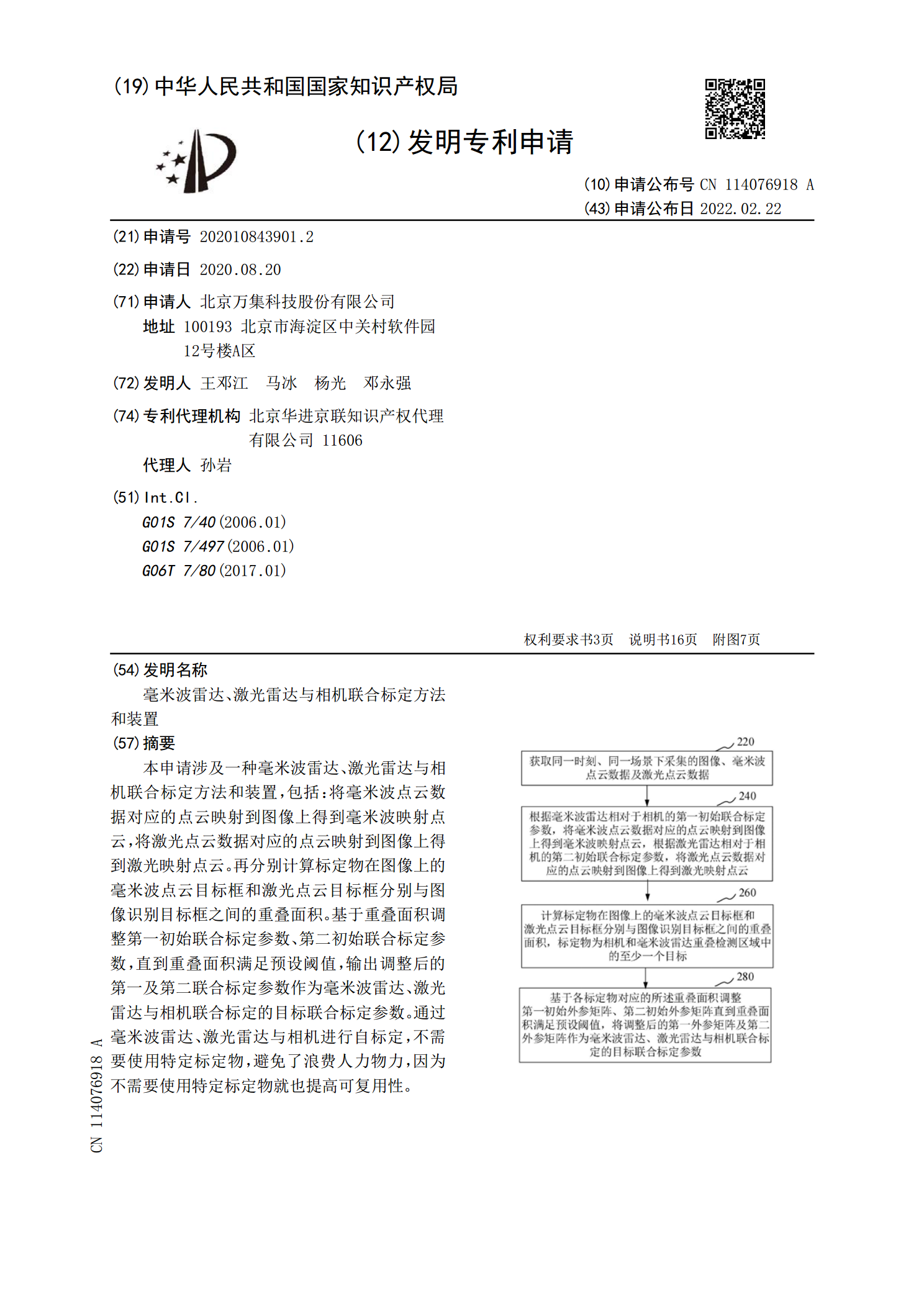
本申请涉及一种毫米波雷达、激光雷达与相机联合标定方法和装置,包括:将毫米波点云数据对应的点云映射到图像上得到毫米波映射点云,将激光点云数据对应的点云映射到图像上得到激光映射点云。再分别计算标定物在图像上的毫米波点云目标框和激光点云目标框分别与图像识别目标框之间的重叠面积。基于重叠面积调整第一初始联合标定参数、第二初始联合标定参数,直到重叠面积满足预设阈值,输出调整后的第一及第二联合标定参数作为毫米波雷达、激光雷达与相机联合标定的目标联合标定参数。通过毫米波雷达、激光雷达与相机进行自标定,不需要使用特定标定