
基于神经网络的助力搬运装置自适应控制方法研究.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于神经网络的助力搬运装置自适应控制方法研究.docx
基于神经网络的助力搬运装置自适应控制方法研究基于神经网络的助力搬运装置自适应控制方法研究摘要:随着工业自动化水平的提高,助力搬运装置在物流和生产线上发挥着重要的作用。然而,由于工作环境的复杂性,传统的控制方法往往无法满足复杂动态环境下的精确控制需求。为了解决这一问题,本论文提出了基于神经网络的助力搬运装置自适应控制方法。通过分析和建模助力搬运装置的动力学特性,采用神经网络算法实现自适应控制。实验结果表明,该方法具有良好的控制精度和适应性。关键词:神经网络;助力搬运装置;自适应控制;动力学特性1.引言助力搬
基于神经网络的助力搬运装置自适应控制方法研究.pptx
汇报人:/目录0102神经网络控制方法的原理神经网络控制方法的分类神经网络控制方法的优势03助力搬运装置的组成和工作原理自适应控制方法在助力搬运装置中的应用助力搬运装置自适应控制方法的实现过程04神经网络模型的选择和设计自适应控制算法的设计和实现控制系统整体架构和实现流程05实验环境和实验条件实验过程和实验结果结果分析和讨论06研究结论研究不足和展望汇报人:

基于神经网络的无模型自适应控制方法的研究.docx
基于神经网络的无模型自适应控制方法的研究基于神经网络的无模型自适应控制方法的研究摘要:近年来,随着神经网络技术的发展和应用范围的扩大,基于神经网络的控制方法逐渐受到广泛关注。本文主要研究基于神经网络的无模型自适应控制方法,该方法不依赖先验的系统模型,能够适应各种复杂的非线性系统。本文首先介绍了传统的模型和模型自适应控制方法的局限性,然后详细介绍了基于神经网络的无模型自适应控制方法的原理和优势。最后通过数值模拟实验验证了该方法的有效性。关键词:神经网络、无模型自适应控制、非线性系统1.引言传统的控制方法通常

基于神经网络的无模型自适应控制方法的研究的开题报告.docx
基于神经网络的无模型自适应控制方法的研究的开题报告一、选题背景在工业控制领域中,自适应控制技术近年来得到了广泛的研究与应用。针对传统的基于模型的自适应控制方法的局限性,研究人员开始将神经网络等非线性模型纳入到自适应控制中。因此,基于神经网络的无模型自适应控制方法逐渐成为了一个研究热点。二、选题意义传统的自适应控制方法通常需要预先建立系统的数学模型,这一过程往往需要对系统进行全面的分析和建模,因此对工程师的能力有较高的要求。而神经网络是一种能够自动学习和适应非线性系统的工具,在无需准确的数学模型的情况下,就
电动助力转向控制装置及其自适应相位补偿方法.pdf
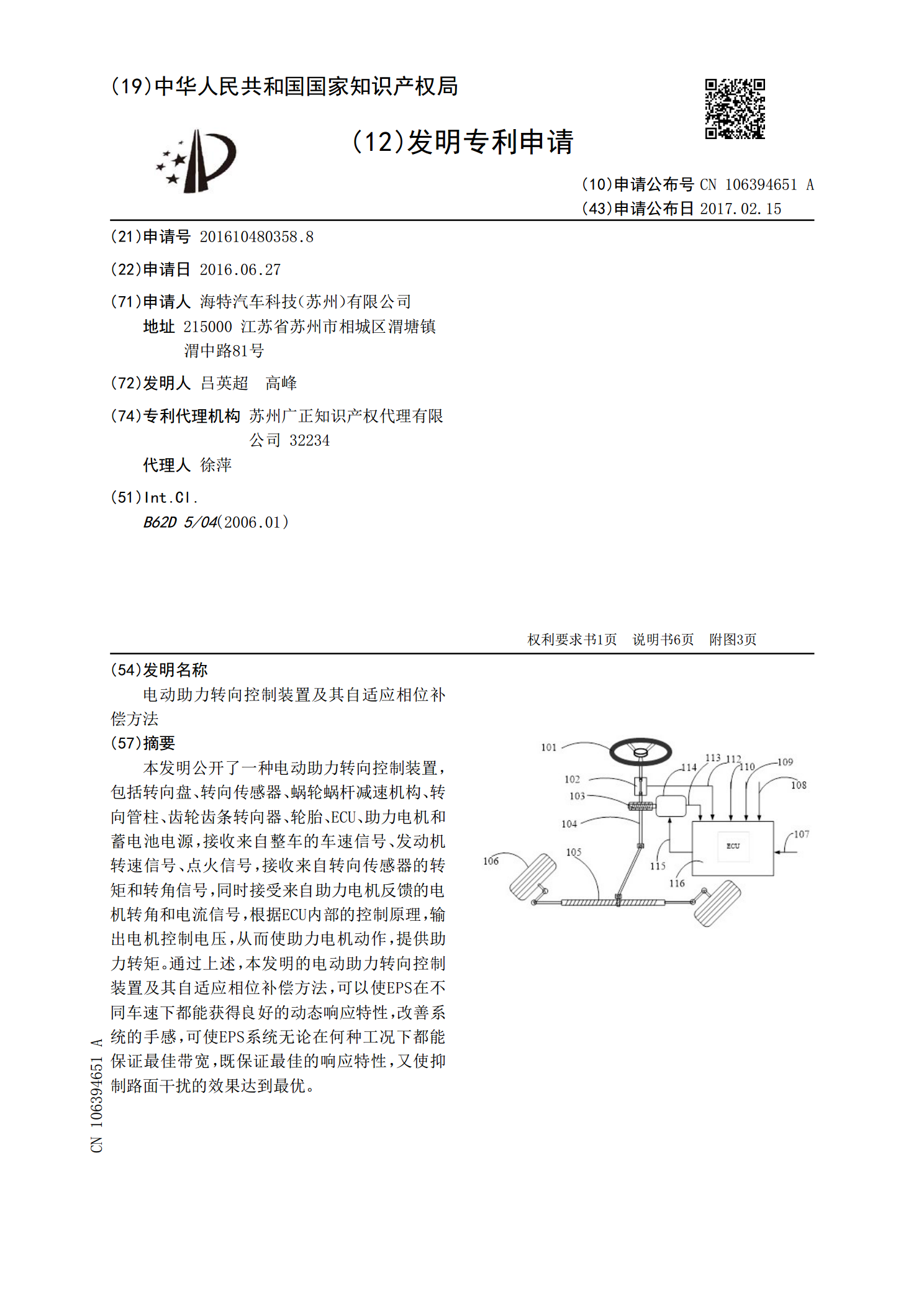
本发明公开了一种电动助力转向控制装置,包括转向盘、转向传感器、蜗轮蜗杆减速机构、转向管柱、齿轮齿条转向器、轮胎、ECU、助力电机和蓄电池电源,接收来自整车的车速信号、发动机转速信号、点火信号,接收来自转向传感器的转矩和转角信号,同时接受来自助力电机反馈的电机转角和电流信号,根据ECU内部的控制原理,输出电机控制电压,从而使助力电机动作,提供助力转矩。通过上述,本发明的电动助力转向控制装置及其自适应相位补偿方法,可以使EPS在不同车速下都能获得良好的动态响应特性,改善系统的手感,可使EPS系统无论在何种工况