
基于深度图的影像密集匹配算法的改进.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于深度图的影像密集匹配算法的改进.docx
基于深度图的影像密集匹配算法的改进随着计算机视觉技术的不断发展,基于深度图的影像密集匹配算法在三维重建、自动驾驶、机器人视觉等方面有着广泛的应用。然而,该算法在时间效率、匹配精度等方面还存在着一些瓶颈,因此,对于该算法的优化改进是非常必要的。本文主要针对基于深度图的影像密集匹配算法的优化改进进行探讨。首先,文章简要介绍了现有的基于深度图的影像密集匹配算法的原理和优缺点。其次,针对该算法的瓶颈分析,提出了几种可行的解决方法,并对这些方法的效果进行了比较分析。最后,本文总结了改进后的算法的优点和应用前景。一、

基于改进SIFT算法的无人机影像匹配.pptx
,目录PartOnePartTwoSIFT算法的起源和原理SIFT算法在图像匹配中的重要性SIFT算法的优缺点PartThree改进SIFT算法的提出背景改进SIFT算法的主要改进点改进SIFT算法的实现过程PartFour无人机影像匹配的应用场景无人机影像匹配的基本原理无人机影像匹配的挑战和难点PartFive实验环境和数据集实验方法和过程实验结果和分析与传统SIFT算法的对比分析PartSix基于改进SIFT算法的无人机影像匹配的优势和价值未来研究方向和挑战THANKS

基于改进SIFT算法的无人机影像匹配.docx
基于改进SIFT算法的无人机影像匹配一、研究背景随着无人机技术的不断发展和完善,其在农业、测绘、自然灾害等领域的应用越来越广泛。其中,无人机影像测量是无人机应用领域中的一个重要分支,其主要工作是对无人机拍摄的图像进行匹配,获得丰富的地理信息数据并用于后续分析。影像匹配技术的效果直接影响着无人机应用的效果和精度,而针对无人机影像匹配问题的算法也很多,SIFT(Scale-InvariantFeatureTransform)算法因其具有良好的不变性、可靠性、适应性等特点被广泛应用于影像匹配领域。但是,由于SI
基于深度图改进的分块密集匹配方法、系统、终端及介质.pdf
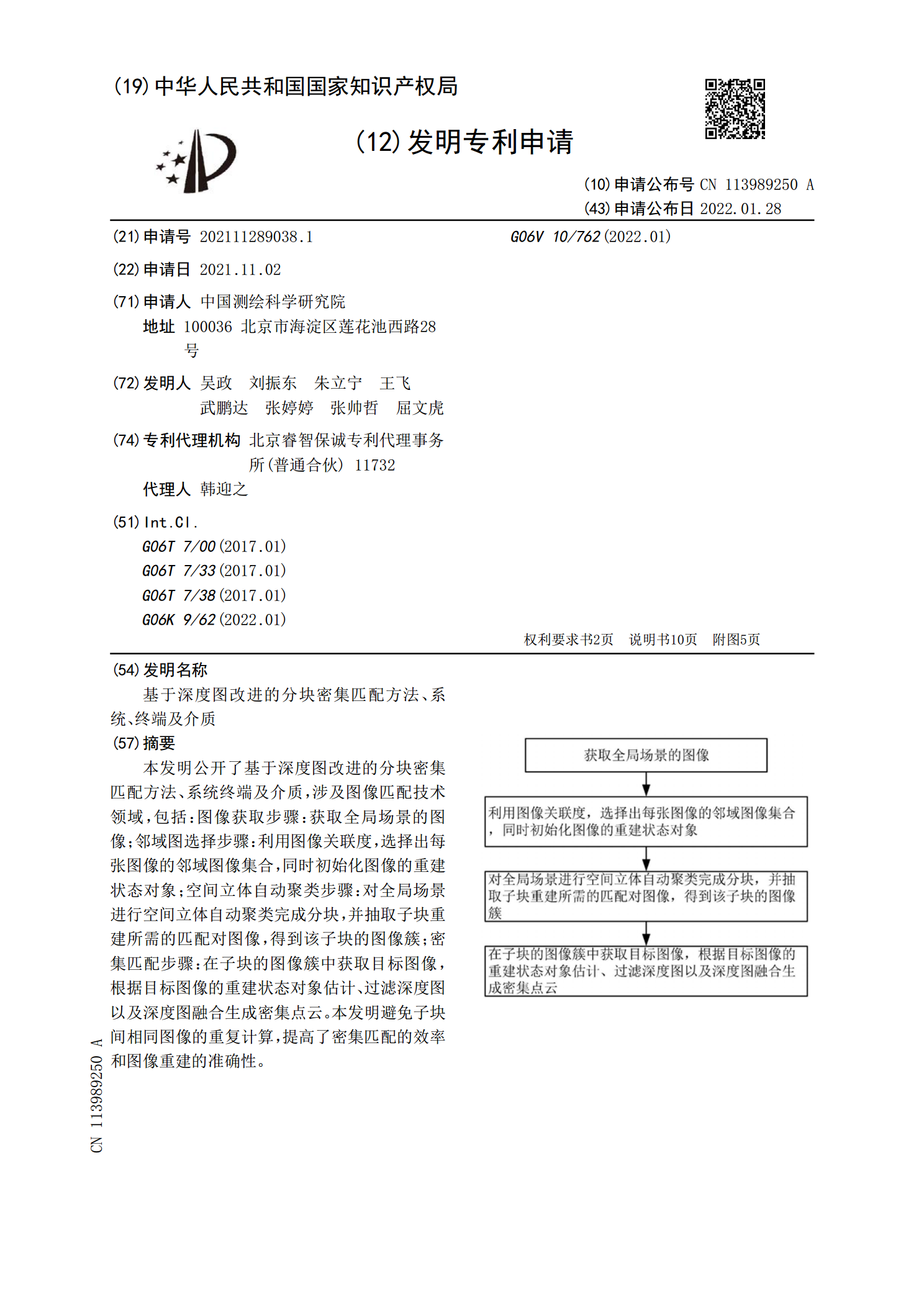
本发明公开了基于深度图改进的分块密集匹配方法、系统终端及介质,涉及图像匹配技术领域,包括:图像获取步骤:获取全局场景的图像;邻域图选择步骤:利用图像关联度,选择出每张图像的邻域图像集合,同时初始化图像的重建状态对象;空间立体自动聚类步骤:对全局场景进行空间立体自动聚类完成分块,并抽取子块重建所需的匹配对图像,得到该子块的图像簇;密集匹配步骤:在子块的图像簇中获取目标图像,根据目标图像的重建状态对象估计、过滤深度图以及深度图融合生成密集点云。本发明避免子块间相同图像的重复计算,提高了密集匹配的效率和图像重建

一种基于PatchMatch的多视影像密集匹配改进方法.docx
一种基于PatchMatch的多视影像密集匹配改进方法基于PatchMatch的多视影像密集匹配改进方法摘要:随着多视影像处理技术的快速发展,多视影像密集匹配在三维重建、立体匹配等领域有着重要应用。本文提出了一种基于PatchMatch的多视影像密集匹配改进方法。首先,介绍了PatchMatch算法的原理和不足之处。接着,针对PatchMatch算法在匹配质量和效率上存在的问题,提出了一种改进方法。该方法通过增加随机搜索的范围和使用领域一致性来提高匹配质量,并通过多线程处理实现匹配过程的加速。实验证明,该