
基于深度图改进的分块密集匹配方法、系统、终端及介质.pdf

英哲****公主

1/10
2/10
3/10
4/10

5/10
6/10
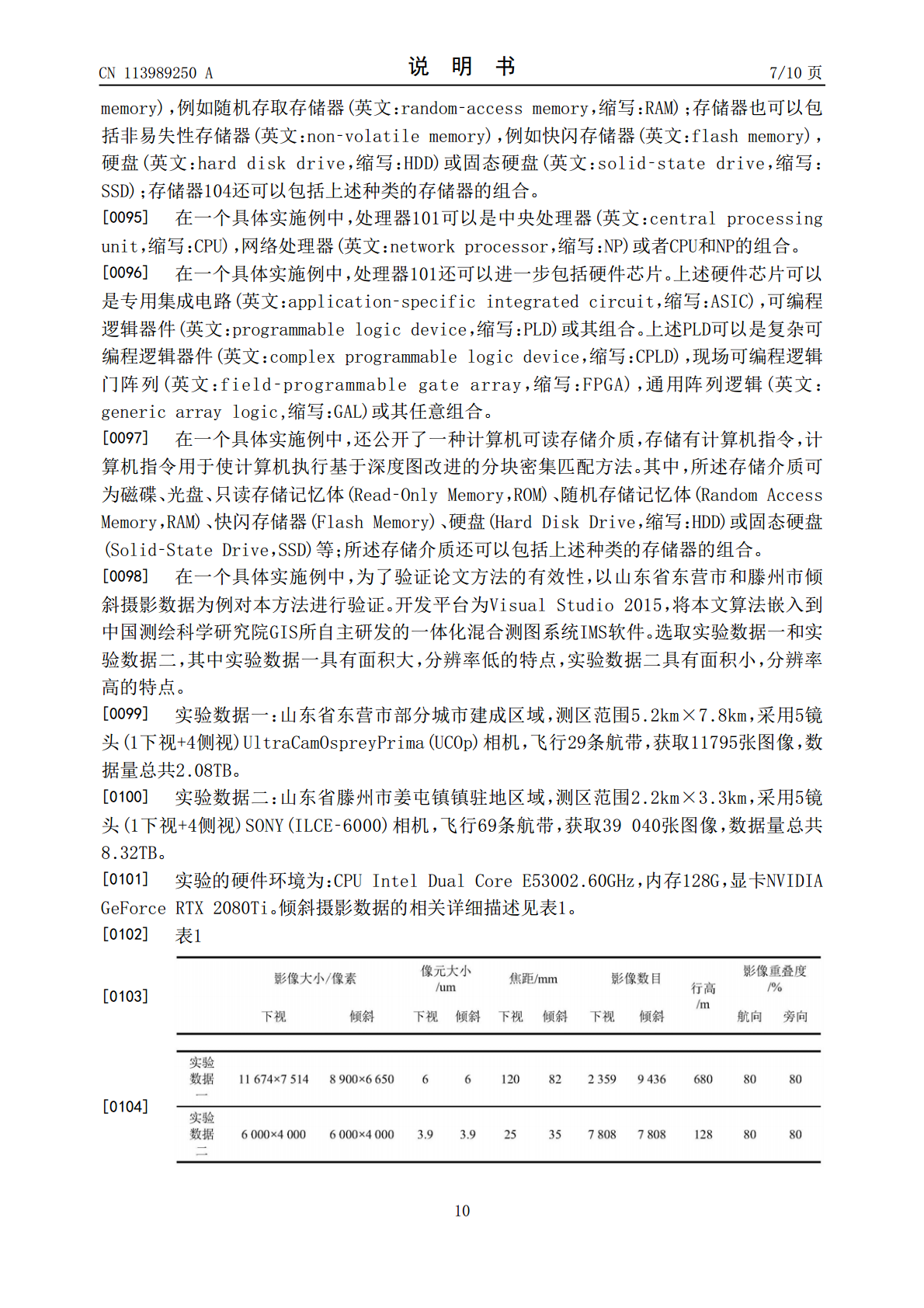
7/10
8/10
9/10
10/10
亲,该文档总共18页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于深度图改进的分块密集匹配方法、系统、终端及介质.pdf
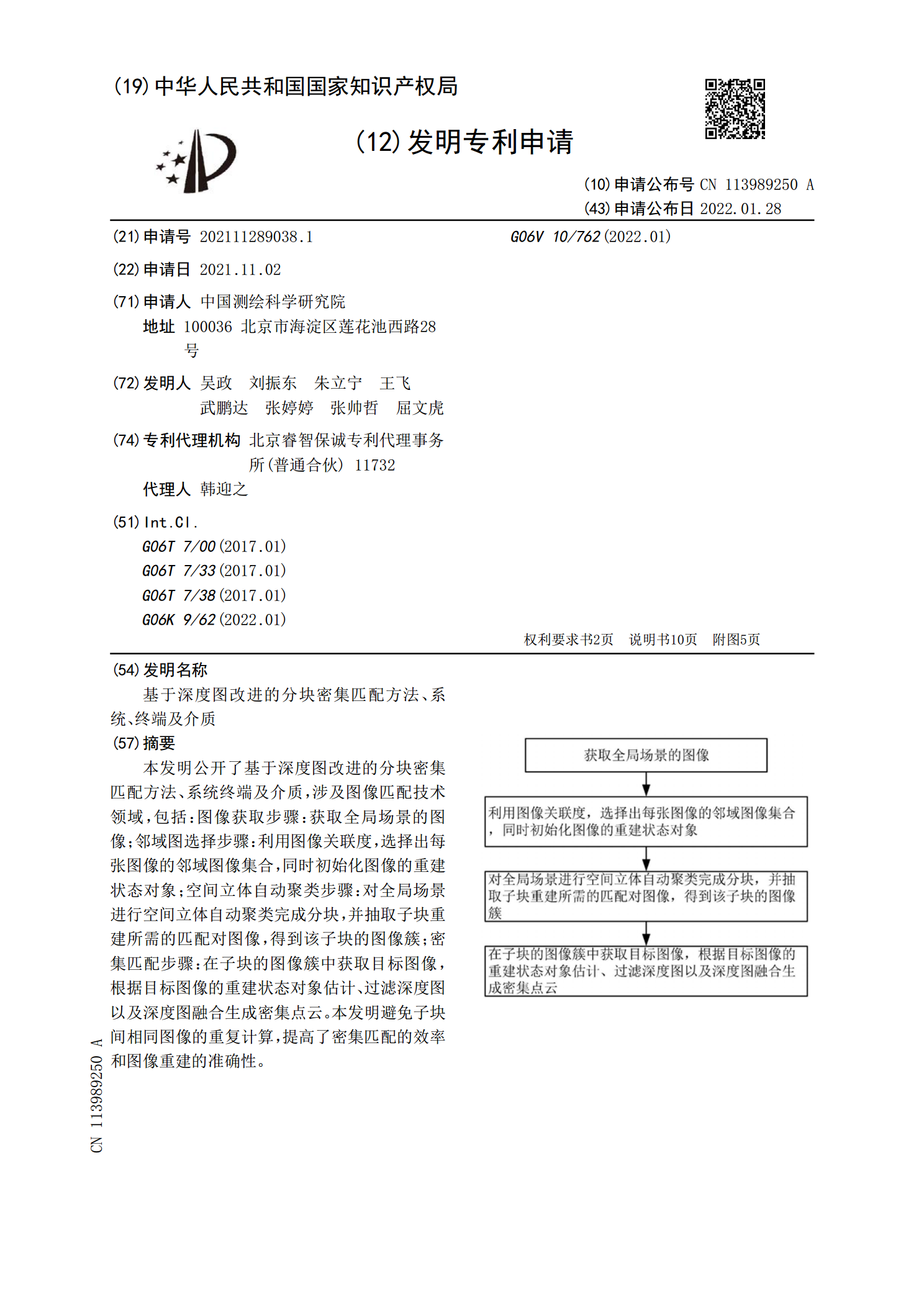
本发明公开了基于深度图改进的分块密集匹配方法、系统终端及介质,涉及图像匹配技术领域,包括:图像获取步骤:获取全局场景的图像;邻域图选择步骤:利用图像关联度,选择出每张图像的邻域图像集合,同时初始化图像的重建状态对象;空间立体自动聚类步骤:对全局场景进行空间立体自动聚类完成分块,并抽取子块重建所需的匹配对图像,得到该子块的图像簇;密集匹配步骤:在子块的图像簇中获取目标图像,根据目标图像的重建状态对象估计、过滤深度图以及深度图融合生成密集点云。本发明避免子块间相同图像的重复计算,提高了密集匹配的效率和图像重建

基于深度图的影像密集匹配算法的改进.docx
基于深度图的影像密集匹配算法的改进随着计算机视觉技术的不断发展,基于深度图的影像密集匹配算法在三维重建、自动驾驶、机器人视觉等方面有着广泛的应用。然而,该算法在时间效率、匹配精度等方面还存在着一些瓶颈,因此,对于该算法的优化改进是非常必要的。本文主要针对基于深度图的影像密集匹配算法的优化改进进行探讨。首先,文章简要介绍了现有的基于深度图的影像密集匹配算法的原理和优缺点。其次,针对该算法的瓶颈分析,提出了几种可行的解决方法,并对这些方法的效果进行了比较分析。最后,本文总结了改进后的算法的优点和应用前景。一、

基于Unity引擎的分块加载方法、装置、终端及存储介质.pdf
本申请公开了一种基于Unity引擎的分块加载方法、装置、终端及存储介质。方法包括:将预设模型进行划分,得到n×n个子模型;对n×n个子模型进行数据化处理,得到n×n个子模型对应的n×n个子区域数据;根据n×n个子区域数据,确定目标子区域块;根据目标子区域块,确定目标展示区、目标缓存区和目标卸载区。本发明使用PolygonCruncher插件对模型数据进行自动化减面优化,顶点数平均减少16倍,且对模型进行分块处理,再进行合理的加载卸载来达到性能开销上的平衡,有效降低内存。
基于大数据的求职风险匹配分析方法、系统、终端及介质.pdf
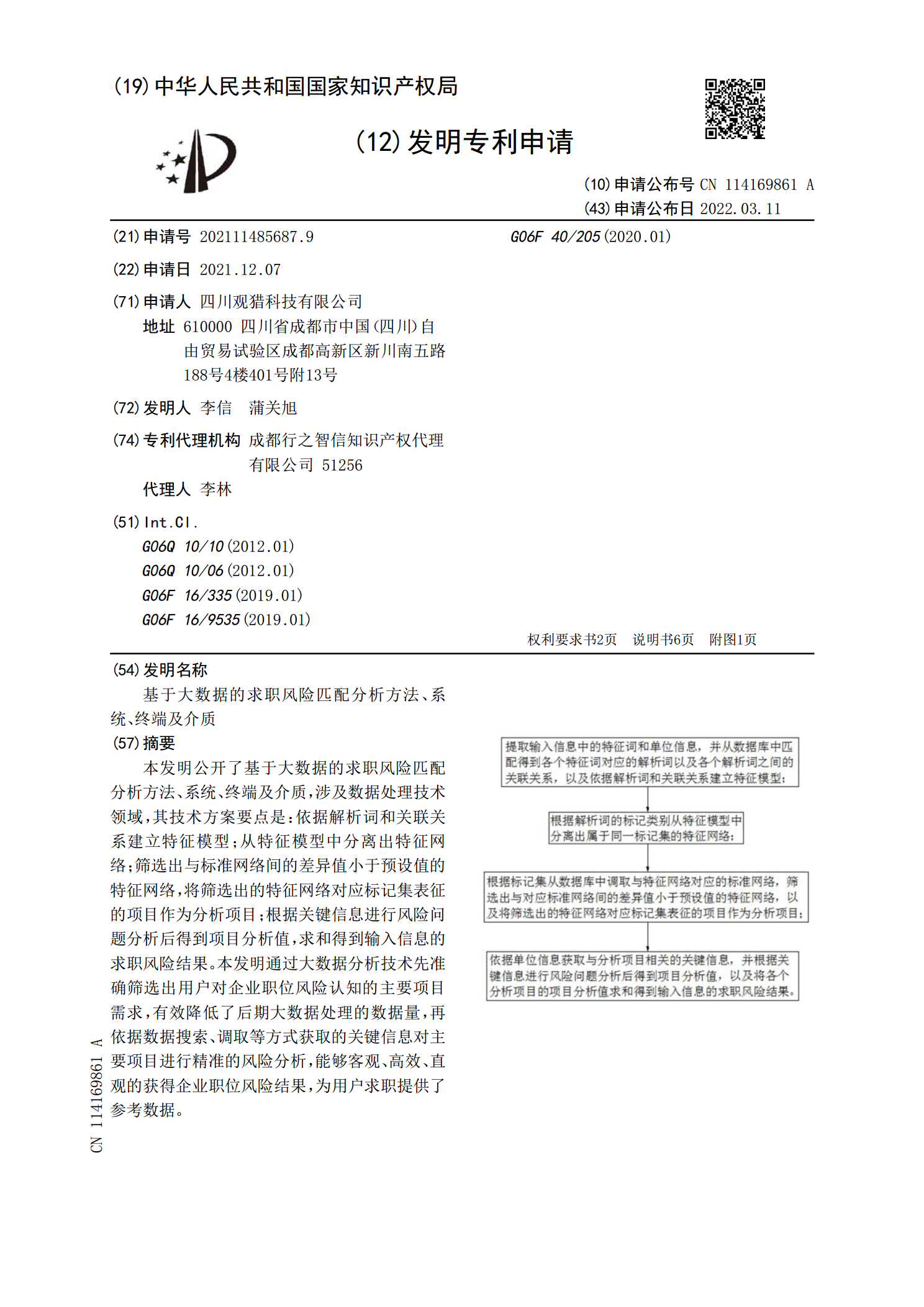
本发明公开了基于大数据的求职风险匹配分析方法、系统、终端及介质,涉及数据处理技术领域,其技术方案要点是:依据解析词和关联关系建立特征模型;从特征模型中分离出特征网络;筛选出与标准网络间的差异值小于预设值的特征网络,将筛选出的特征网络对应标记集表征的项目作为分析项目;根据关键信息进行风险问题分析后得到项目分析值,求和得到输入信息的求职风险结果。本发明通过大数据分析技术先准确筛选出用户对企业职位风险认知的主要项目需求,有效降低了后期大数据处理的数据量,再依据数据搜索、调取等方式获取的关键信息对主要项目进行精准

一种基于PatchMatch的多视影像密集匹配改进方法.docx
一种基于PatchMatch的多视影像密集匹配改进方法基于PatchMatch的多视影像密集匹配改进方法摘要:随着多视影像处理技术的快速发展,多视影像密集匹配在三维重建、立体匹配等领域有着重要应用。本文提出了一种基于PatchMatch的多视影像密集匹配改进方法。首先,介绍了PatchMatch算法的原理和不足之处。接着,针对PatchMatch算法在匹配质量和效率上存在的问题,提出了一种改进方法。该方法通过增加随机搜索的范围和使用领域一致性来提高匹配质量,并通过多线程处理实现匹配过程的加速。实验证明,该