
基于模糊控制算法的智能小车避障系统设计.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于模糊控制算法的智能小车避障系统设计.docx
基于模糊控制算法的智能小车避障系统设计随着智能技术和自动驾驶技术的不断发展,智能小车成为科技界无比热门的研究领域。智能小车是一个能够感知环境并自主决策的机器人,可以自主导航、避障、跟踪、物品抓取和运输等任务,具备广泛的应用场景。其中,避障技术是智能小车的重要功能之一,本文将介绍一种基于模糊控制算法的智能小车避障系统设计。1.智能小车避障系统的设计思路智能小车避障系统主要分为两部分:传感器和控制器。传感器是获取环境信息的重要设备,可以通过激光雷达、超声波传感器、红外线传感器等方式来获取车辆周围障碍物的位置和
基于模糊控制的智能小车避障设计.pdf
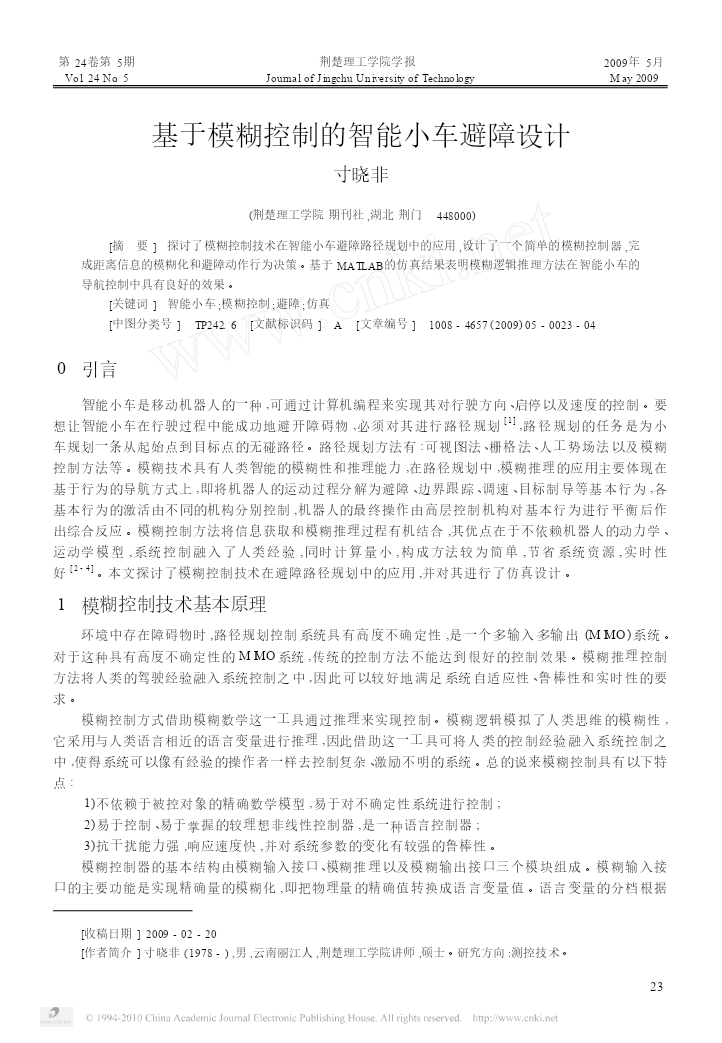
第24卷第5期荆楚理工学院学报2009年5月Vol.24No.5JournalofJingchuUniversityofTechnologyMay2009基于模糊控制的智能小车避障设计寸晓非(荆楚理工学院期刊社,湖北荆门448000)[摘要]探讨了模糊控制技术在智能小车避障路径规划中的应用,设计了一个简单的模糊控制器,完成距离信息的模糊化和避障动作行为决策。基于MATLAB的仿真结果表明模糊逻辑推理方法在智能小车的导航控制中具有良好的效果。[关键词]智能小车;模糊控制;避障;仿真[中图分类号]TP242.

基于循迹避障控制系统的智能小车遥控设计.docx
基于循迹避障控制系统的智能小车遥控设计智能小车在现代科技领域中扮演着重要的角色,其具备通过传感器感知环境,根据环境信息实现自主导航、循迹、避障等功能。本文针对智能小车的循迹避障控制系统进行设计与研究,并借助遥控技术实现对智能小车的远程控制。首先,介绍智能小车的背景及概述;接着,详细描述智能小车的循迹避障控制系统设计方案;然后,探讨智能小车遥控技术在系统中的应用和实现方法;最后,给出对智能小车循迹避障控制系统的评价和未来发展趋势的展望。一、引言智能小车是一种具备自主导航、传感器感知、决策和执行功能的移动机器
智能小车避障系统设计.pdf
[在此处键入]毕业设计说明书设计题目:专业:班级:学号:姓名:指导教师:二〇一五年十二月二日I[在此处键入]目录摘要..............................................................1第1章绪论........................................................2第2章方案论证....................................................42.1系统总体方案设计.

智能循迹避障小车控制系统设计.docx
课程名称:微机接口技术与数字控制课程编号:09Z077005论文题目:基于STC89C52单片机自动避障循迹小车控制系统的设计研究生姓名:肖青峰、徐鹏、付高峰学号:16721678论文评语:成绩:任课教师:沈林勇评阅日期:基于STC89C52单片机自动避障循迹小车控制系统设计肖青峰、徐鹏、付高峰上海大学机电工程与自动化学院,上海200072摘要:本设计是基于STC89C52单片机的自动循迹避障小车的控制系统设计。利用红外对管检测黑线与障碍物,并以STC89C52单片机为控制芯片控制电动小汽车的速度及转向,