
基于干扰观测器的小卫星自适应积分滑模姿态控制.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于干扰观测器的小卫星自适应积分滑模姿态控制.docx
基于干扰观测器的小卫星自适应积分滑模姿态控制基于干扰观测器的小卫星自适应积分滑模姿态控制摘要:随着小卫星技术的不断发展,对小卫星的姿态控制也提出了更高的要求。本文提出了一种基于干扰观测器的小卫星自适应积分滑模姿态控制方法。该方法通过引入干扰观测器来实时估计和补偿系统的外部干扰,并通过自适应积分和滑模控制相结合的方式,提高了小卫星的姿态控制精度和鲁棒性。仿真结果表明,该方法能够有效应对外部干扰,实现小卫星的精确姿态控制。关键词:小卫星;姿态控制;干扰观测器;自适应积分滑模控制一、引言小卫星是一种重量轻、体积

基于滑模观测器的卫星姿态控制系统滑模容错控制.docx
基于滑模观测器的卫星姿态控制系统滑模容错控制随着卫星技术的不断发展和应用的广泛,卫星姿态控制问题受到了越来越多的关注。卫星姿态控制系统的目标是使卫星保持一定的朝向和轨道,以保证卫星的稳定运行和正常任务执行。在实际应用中,由于各种原因,卫星姿态控制系统中可能会出现各种故障,如传感器故障、执行机构故障等,因此需要设计一种可靠的滑模容错控制策略来保证卫星姿态稳定和任务完成。滑模观测器是一种基于滑模控制的控制策略,它通过观测器来实现对卫星姿态的估计和反馈控制。滑模容错控制则是在滑模观测器的基础上,综合考虑各种故障
一种轮控小卫星自适应积分滑模姿态控制器.pdf
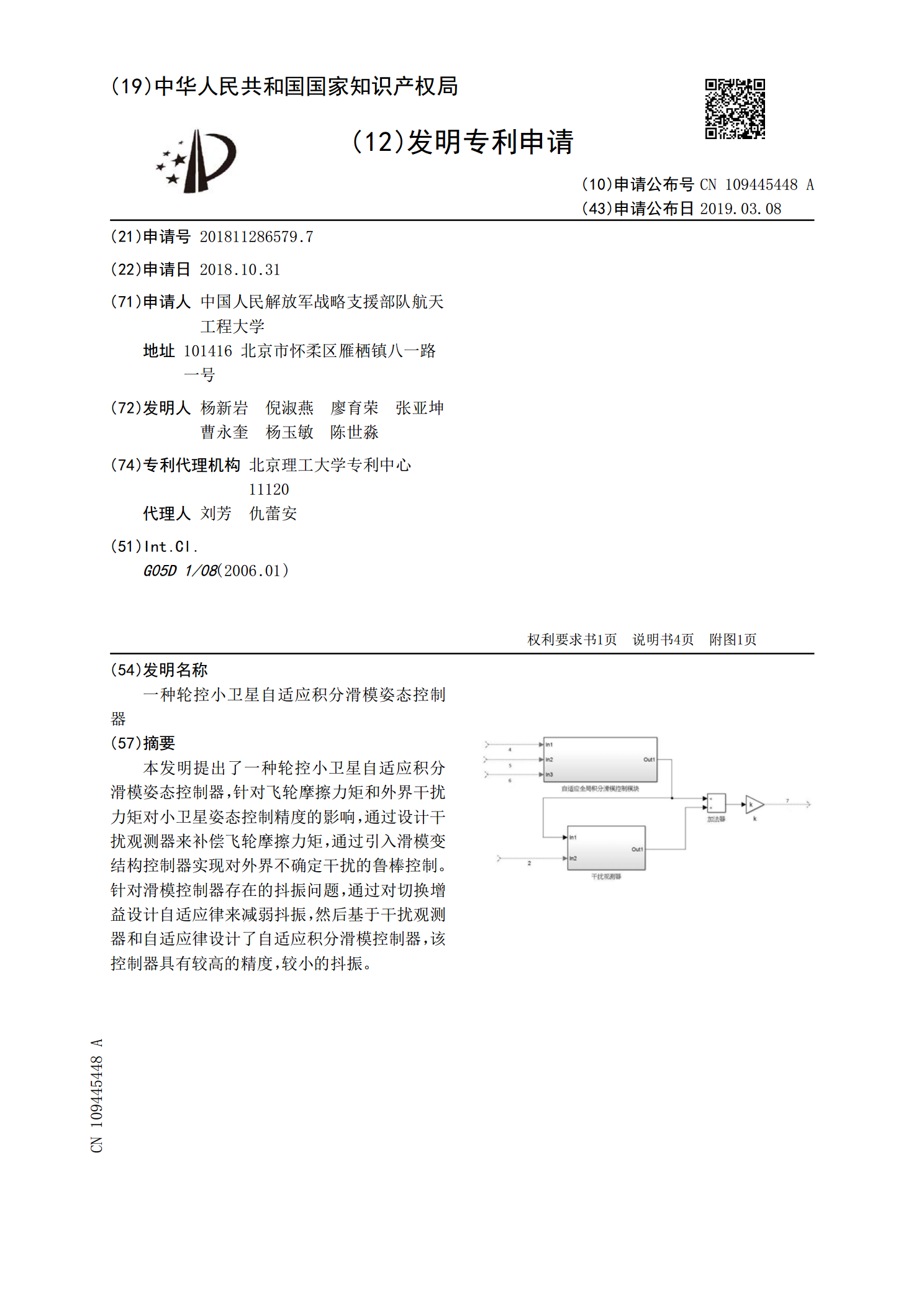
本发明提出了一种轮控小卫星自适应积分滑模姿态控制器,针对飞轮摩擦力矩和外界干扰力矩对小卫星姿态控制精度的影响,通过设计干扰观测器来补偿飞轮摩擦力矩,通过引入滑模变结构控制器实现对外界不确定干扰的鲁棒控制。针对滑模控制器存在的抖振问题,通过对切换增益设计自适应律来减弱抖振,然后基于干扰观测器和自适应律设计了自适应积分滑模控制器,该控制器具有较高的精度,较小的抖振。

基于滑模干扰观测器的机械臂终端滑模控制.docx
基于滑模干扰观测器的机械臂终端滑模控制基于滑模干扰观测器的机械臂终端滑模控制摘要:机械臂广泛应用于工业生产中的装配、搬运、焊接等任务。然而,由于机械臂的多自由度和非线性特性,其控制问题具有一定的挑战性。为了提高机械臂的控制性能,本文提出了一种基于滑模干扰观测器的机械臂终端滑模控制方法。该方法通过引入滑模干扰观测器,实现对非线性干扰的在线估计和抵消,从而提高了机械臂系统的鲁棒性和控制精度。通过仿真实验证明了该方法的有效性和优越性。关键词:滑模控制;机械臂;滑模干扰观测器;控制精度;鲁棒性1.引言机械臂是一种

基于滑模控制的卫星姿态控制算法研究.docx
基于滑模控制的卫星姿态控制算法研究论文题目:基于滑模控制的卫星姿态控制算法研究摘要:卫星姿态控制是卫星运行过程中的重要环节,其目的是保持卫星特定的运动状态以及方向性。滑模控制是一种常用的姿态控制算法,具有快速、鲁棒性强等特点,本文通过对滑模控制算法的研究,探讨其在卫星姿态控制中的应用。研究结果表明,基于滑模控制的卫星姿态控制算法能够有效地调节卫星的角度和角速度,提高卫星稳定性和精确性,为卫星任务的顺利完成提供了重要支持。关键词:卫星姿态控制、滑模控制、角度调节、角速度调节、稳定性一、引言卫星姿态控制是卫星