
基于制动转向协同控制的智能车紧急避障研究.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于制动转向协同控制的智能车紧急避障研究.docx
基于制动转向协同控制的智能车紧急避障研究智能车技术一直是汽车领域研究的热点之一。随着城市交通压力的不断加大和交通事故频发,智能车紧急避障技术越来越受到重视。本论文将针对基于制动转向协同控制的智能车紧急避障技术进行研究和探讨。一、背景介绍智能车技术是通过与外界环境交互,实现整车自主、智能驾驶的一种汽车领域新兴技术。目前,智能车技术已经取得了较大的进展,在自动驾驶、感知定位等领域取得了重要突破。然而,由于人员驾驶习惯、道路环境等因素的影响,车辆在行驶过程中难以完全做到稳定、安全。特别是在面对突发情况或紧急避让

基于制动转向协同的智能车辆避撞系统研究的开题报告.docx
基于制动转向协同的智能车辆避撞系统研究的开题报告一、研究背景近年来,智能驾驶技术得到了广泛关注和研究。智能驾驶技术能够帮助驾驶员更好地掌握车辆,降低行车风险,提高通行效率。特别是,在城市道路等高密度交通环境下,避免车辆碰撞是尤为重要的安全问题,车辆避撞系统的研发也成为了当前智能驾驶技术研究的热点。传统的避撞系统主要采用车辆期望路径和实际路径的偏离情况来决定是否触发制动、警告等预警措施,但由于其需要驾驶员主动操作,因此在避免事故发生方面仍存在一定的局限性。而制动转向协同避撞系统则将智能制动和转向控制融合在一

基于功能分配与多目标模糊决策的转向与制动协同避撞控制.docx
基于功能分配与多目标模糊决策的转向与制动协同避撞控制转向与制动协同避撞控制是汽车安全控制的一个重要研究方向。如何通过合理地分配车辆转向和制动功能,并采用多目标模糊决策方法,实现车辆避撞的高效、准确控制,对于提高汽车行驶安全性具有重要的意义。一、分析车辆转向与制动对避撞控制的影响车辆的转向与制动是影响其行驶安全的两个重要参数。转向可以影响车辆的行驶方向和车辆的速度,而制动可以控制车辆的速度和停车距离。在避撞控制方面,转向和制动可以通过协同作用来实现避撞。比如,在高速公路上遇到突然的交通堵塞或紧急情况时,通过

未知环境下基于行为的智能探测车避障控制研究的开题报告.docx
未知环境下基于行为的智能探测车避障控制研究的开题报告一、选题的背景和意义随着科技的不断发展,智能化技术的应用越来越广泛。智能探测车作为一种具有自主感知和行动能力的智能机器人,在环境监测、安全巡检等方面有着广泛的应用。在未知环境下,智能探测车需要具备良好的避障控制能力,以保证它安全、高效地完成探测任务。因此,本文旨在研究基于行为的智能探测车避障控制方法,探究在未知环境下智能探测车的避障控制策略,在提高避障控制能力和探测效率的同时,减少人为干预的需求,从而实现智能化、自主化的探测任务。二、研究的内容和方法本研
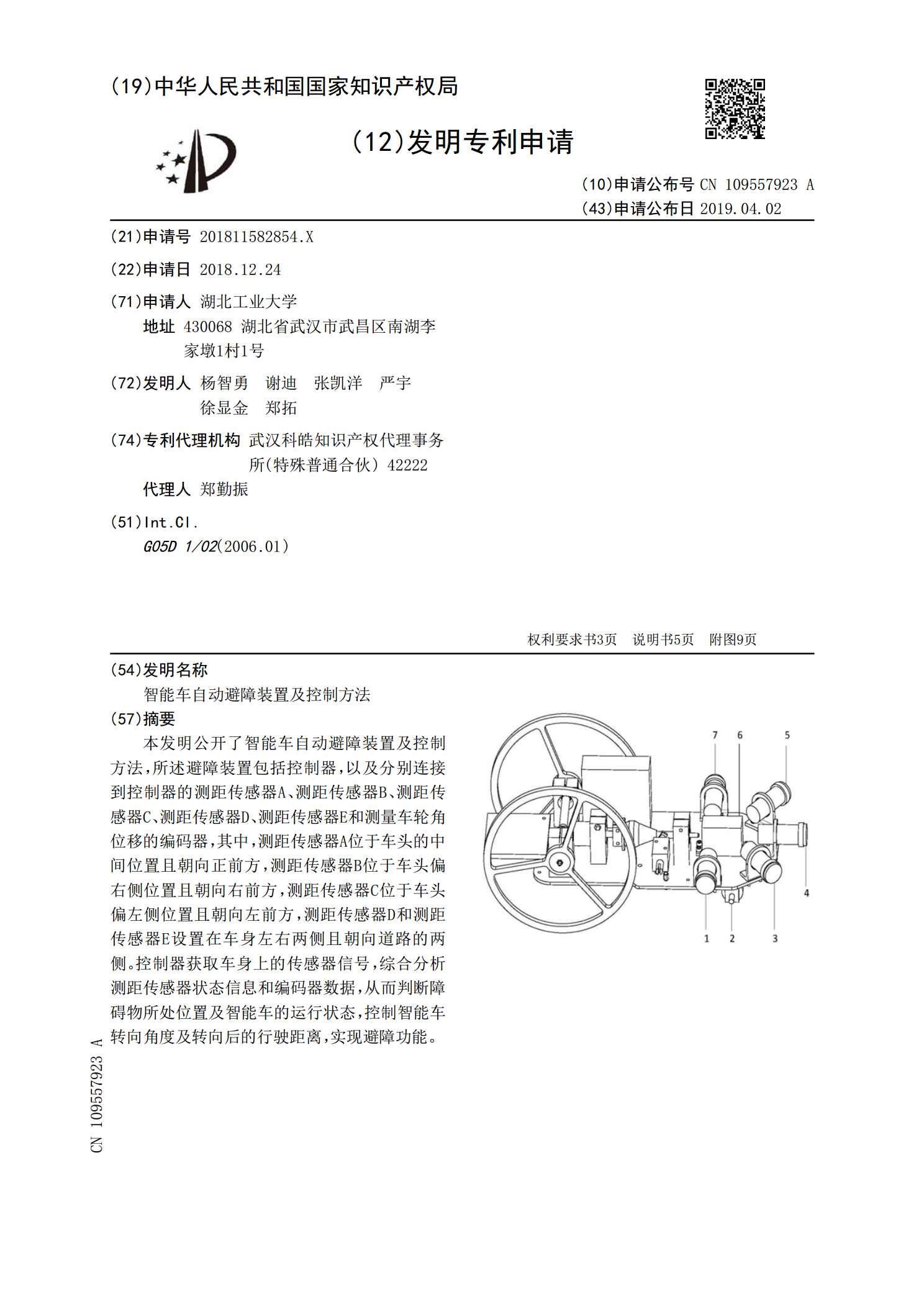
智能车自动避障装置及控制方法.pdf
本发明公开了智能车自动避障装置及控制方法,所述避障装置包括控制器,以及分别连接到控制器的测距传感器A、测距传感器B、测距传感器C、测距传感器D、测距传感器E和测量车轮角位移的编码器,其中,测距传感器A位于车头的中间位置且朝向正前方,测距传感器B位于车头偏右侧位置且朝向右前方,测距传感器C位于车头偏左侧位置且朝向左前方,测距传感器D和测距传感器E设置在车身左右两侧且朝向道路的两侧。控制器获取车身上的传感器信号,综合分析测距传感器状态信息和编码器数据,从而判断障碍物所处位置及智能车的运行状态,控制智能车转向角