
基于ORB特征的复杂场景下的增强现实.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于ORB特征的复杂场景下的增强现实.docx
基于ORB特征的复杂场景下的增强现实近年来,随着计算机视觉和计算机图形学的技术的飞跃进步,增强现实(AR)技术已经开始成为一个相当实用的高科技应用。增强现实的核心目标是将实时的虚拟世界与实际世界合并,从而产生一个可以增强实际感官的全新虚实交互的效果。实现这种虚实结合的核心技术就是将实际场景与加入模型的虚拟实体进行精确定位和跟踪。近年来,ORB算法因其快速、鲁棒、可扩展性等特点受到广泛的研究和应用,成为增强现实中常用的特征点匹配算法。在复杂场景下的增强现实中,ORB算法更加能够体现其优势,有效地解决点匹配问
一种基于特征增强的复杂场景下小目标检测方法.pdf
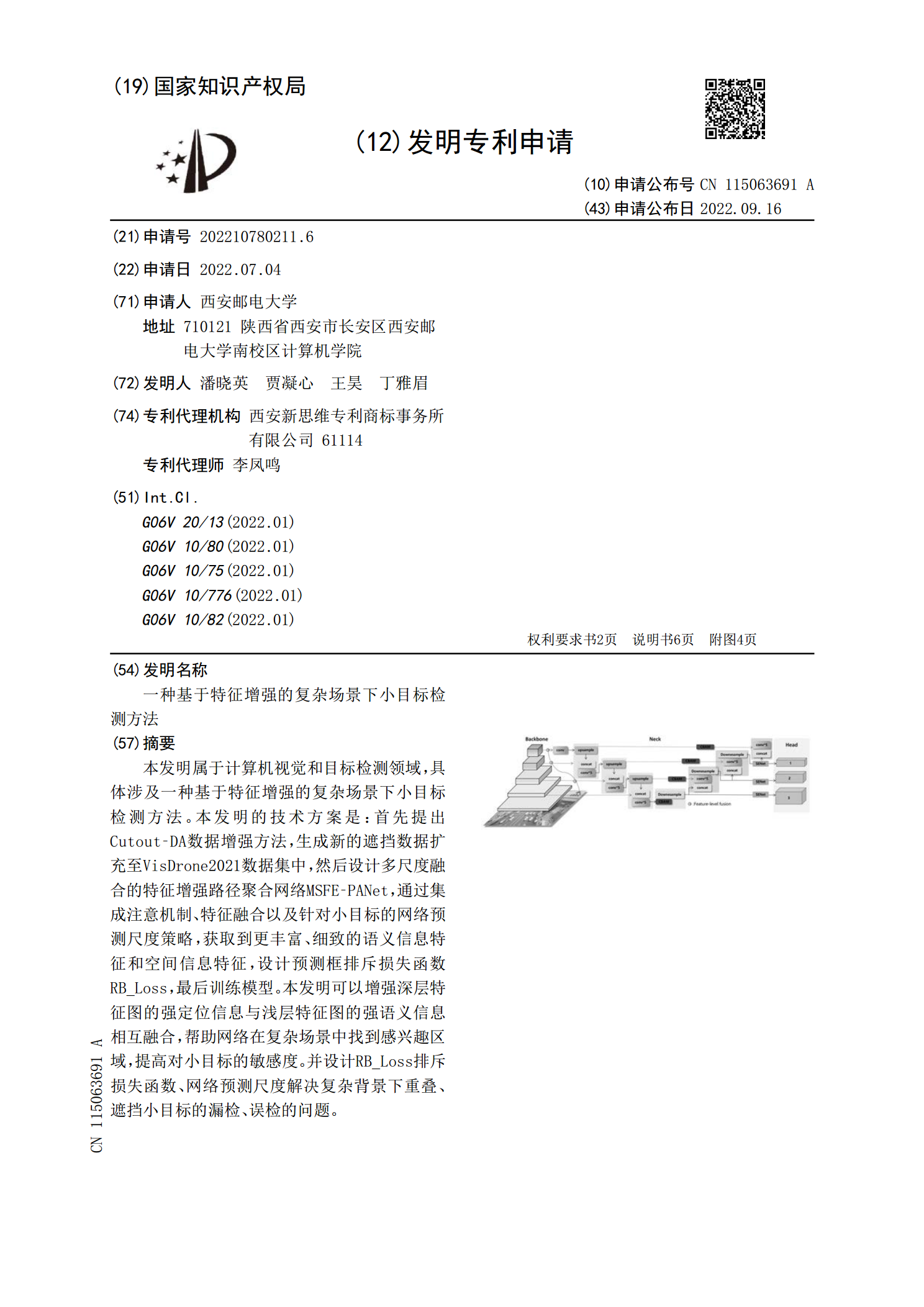
本发明属于计算机视觉和目标检测领域,具体涉及一种基于特征增强的复杂场景下小目标检测方法。本发明的技术方案是:首先提出Cutout‑DA数据增强方法,生成新的遮挡数据扩充至VisDrone2021数据集中,然后设计多尺度融合的特征增强路径聚合网络MSFE‑PANet,通过集成注意机制、特征融合以及针对小目标的网络预测尺度策略,获取到更丰富、细致的语义信息特征和空间信息特征,设计预测框排斥损失函数RB_Loss,最后训练模型。本发明可以增强深层特征图的强定位信息与浅层特征图的强语义信息相互融合,帮助网络在复杂

基于与增强现实场景的用户交互的增强修改.pdf
描述了用于响应于用户交互来修改增强现实的设备、方法和存储介质。在一个实例中,用于修改增强现实的所述设备可以包括处理器、与所述处理器耦合以用于捕捉物理场景的场景捕捉相机、以及由所述处理器操作的增强管理模块。所述增强管理模块可以获取并分析所述物理场景、基于所述分析的结果生成一个或多个虚拟物品以增强对所述物理场景的渲染、追踪与所述经渲染的增强场景的用户交互、并且响应于所述追踪的用户交互来修改或补充所述虚拟物品。可对其他实施例进行描述并要求保护。

基于与增强现实场景的用户交互的增强修改.pdf
描述了用于响应于用户交互来修改增强现实的设备、方法和存储介质。在一个实例中,用于修改增强现实的所述设备可以包括处理器、与所述处理器耦合以用于捕捉物理场景的场景捕捉相机、以及由所述处理器操作的增强管理模块。所述增强管理模块可以获取并分析所述物理场景、基于所述分析的结果生成一个或多个虚拟物品以增强对所述物理场景的渲染、追踪与所述经渲染的增强场景的用户交互、并且响应于所述追踪的用户交互来修改或补充所述虚拟物品。可对其他实施例进行描述并要求保护。
复杂场景下基于增强YOLOv3的船舶目标检测.pptx
,目录PartOnePartTwoYOLOv3算法介绍增强YOLOv3算法改进内容增强YOLOv3算法优势PartThree复杂背景对船舶目标检测的影响船舶姿态变化对检测的挑战天气和光照变化对检测的挑战船舶目标遮挡问题PartFour数据预处理技术特征提取和分类器设计船舶目标定位与识别船舶目标跟踪技术PartFive实验数据集介绍实验环境与参数设置实验结果对比分析与其他算法性能对比PartSix深度学习算法的进一步优化多传感器融合技术应用高性能计算资源的需求实时性处理和低延时技术的研究PartSeven基