
分布式精密编队卫星相对位姿测量技术综述.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

分布式精密编队卫星相对位姿测量技术综述.docx
分布式精密编队卫星相对位姿测量技术综述引言随着卫星应用的快速发展,通信、导航、遥感等领域的需求也越来越高,对编队卫星技术的要求也越来越高。精密编队卫星技术是一项重要的研究内容,它可以实现多颗卫星之间的协作与配合,提高卫星的任务执行效率,拓展应用领域。同时,精密编队卫星技术的成熟度也会影响导航和通信等领域的发展水平。在编队卫星中,相对位姿测量技术是实现精密控制的关键技术之一。本文将分别介绍常用的相对位姿测量方式及其优劣势,并对分布式精密编队卫星相对位姿测量技术进行综述。一、常用的相对位姿测量方式及分析1.观

基于HLA的小卫星编队分布式仿真研究的综述报告.docx
基于HLA的小卫星编队分布式仿真研究的综述报告随着卫星技术的不断发展和应用,小卫星编队技术越来越受到关注和研究。小卫星编队是指多个卫星通过协同作用,形成一定的空间拓扑结构,在共同完成任务的过程中相互配合。基于高级概念(HLA)的小卫星编队分布式仿真研究,是为了实现小卫星编队中的动态同步、数据共享和协同作用,并能够保证地面试验与实际卫星系统之间的一致性,具有重要的理论意义和应用价值。一、小卫星编队的动态同步在小卫星编队中,同步是保证系统工作正常的重要因素。HLA为分布式仿真提供了协作机制,同时也能够提供一种
卫星分布式载荷的编队方法.pdf
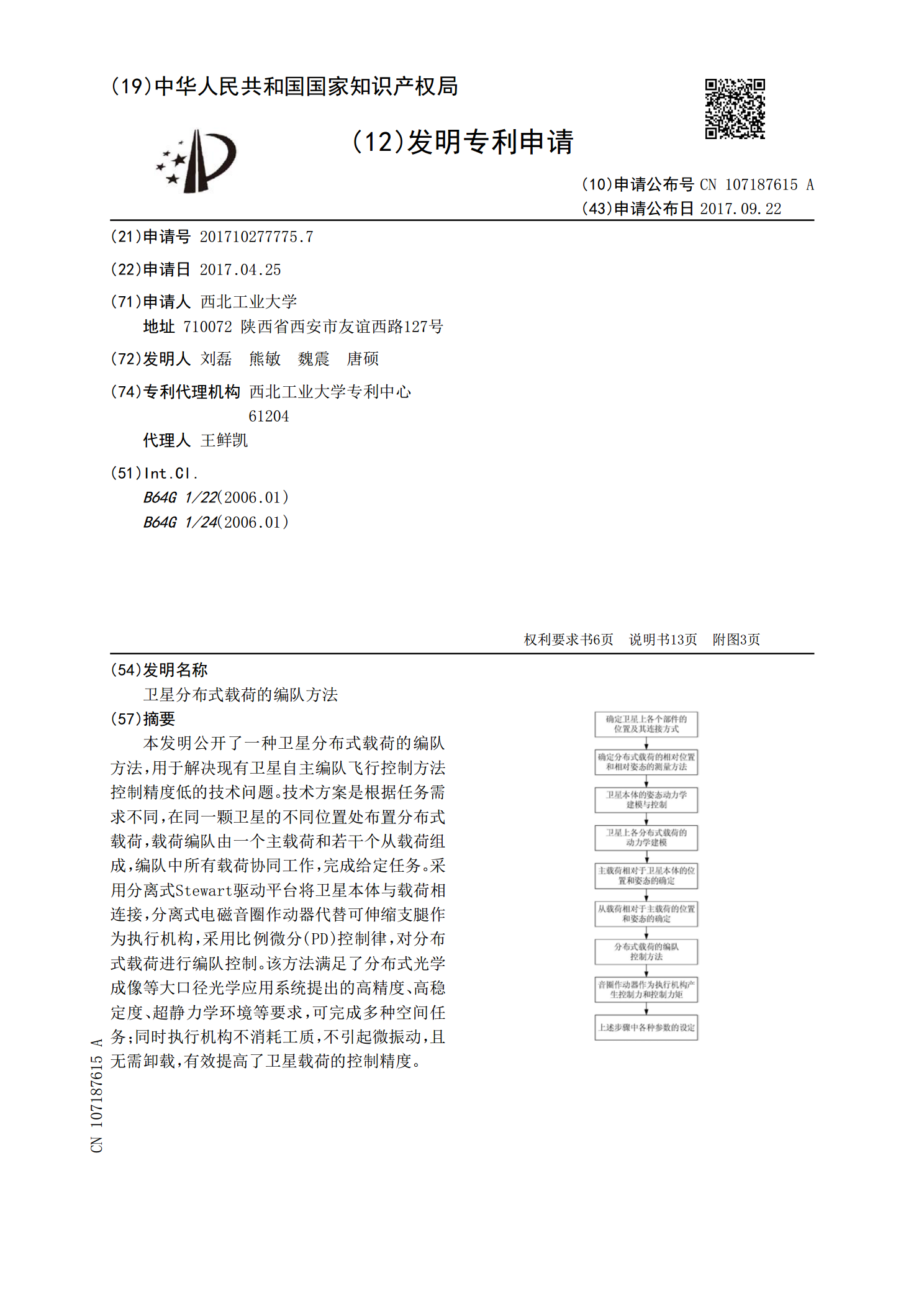
本发明公开了一种卫星分布式载荷的编队方法,用于解决现有卫星自主编队飞行控制方法控制精度低的技术问题。技术方案是根据任务需求不同,在同一颗卫星的不同位置处布置分布式载荷,载荷编队由一个主载荷和若干个从载荷组成,编队中所有载荷协同工作,完成给定任务。采用分离式Stewart驱动平台将卫星本体与载荷相连接,分离式电磁音圈作动器代替可伸缩支腿作为执行机构,采用比例微分(PD)控制律,对分布式载荷进行编队控制。该方法满足了分布式光学成像等大口径光学应用系统提出的高精度、高稳定度、超静力学环境等要求,可完成多种空间任

基于参考轨迹的失效卫星相对位姿建模与控制.docx
基于参考轨迹的失效卫星相对位姿建模与控制本文将探讨基于参考轨迹的失效卫星相对位姿建模与控制的问题。在实际应用中,卫星系统中可能出现卫星失效的情况,这时需要通过控制其他卫星来保持系统的整体性能。在这种情况下,利用参考轨迹建立相对位姿模型并进行控制,是一种有效的解决方案。一、问题描述卫星系统通常由多个卫星组成,卫星之间存在着相互作用和依存关系。如果卫星系统中的某个卫星发生故障或失效,会对整个系统的性能造成影响。为了维护整个系统的性能,需要利用正常卫星进行控制,使得失效卫星维持合适的相对位姿。因此,需要建立一个

测量编队卫星星间基线的方法及系统.pdf
本发明涉及一种测量编队卫星星间基线的方法及系统。其中,测量编队卫星星间基线的方法包括:步骤一,获取基准站和流动站接收到的对于编队卫星星间基线的GPS观测数据;步骤二,对所述GPS观测数据进行预处理,所述预处理包括使用多普勒积分法探测周跳和粗差,以及修复周跳和剔除粗差;步骤三,使用电离层比例因子法计算电离层延迟,根据计算结果改正所述电离层延迟;步骤四,使用载波相位平滑经步骤三改正后的伪距;步骤五,利用经过载波相位平滑后的伪距生成同步的双差观测数据,组建误差方程,通过最小二乘解算所述误差方程,获得编队卫星星间