
卫星分布式载荷的编队方法.pdf

猫巷****松臣

1/10

2/10
3/10

4/10

5/10

6/10

7/10
8/10
9/10
10/10
亲,该文档总共23页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
卫星分布式载荷的编队方法.pdf
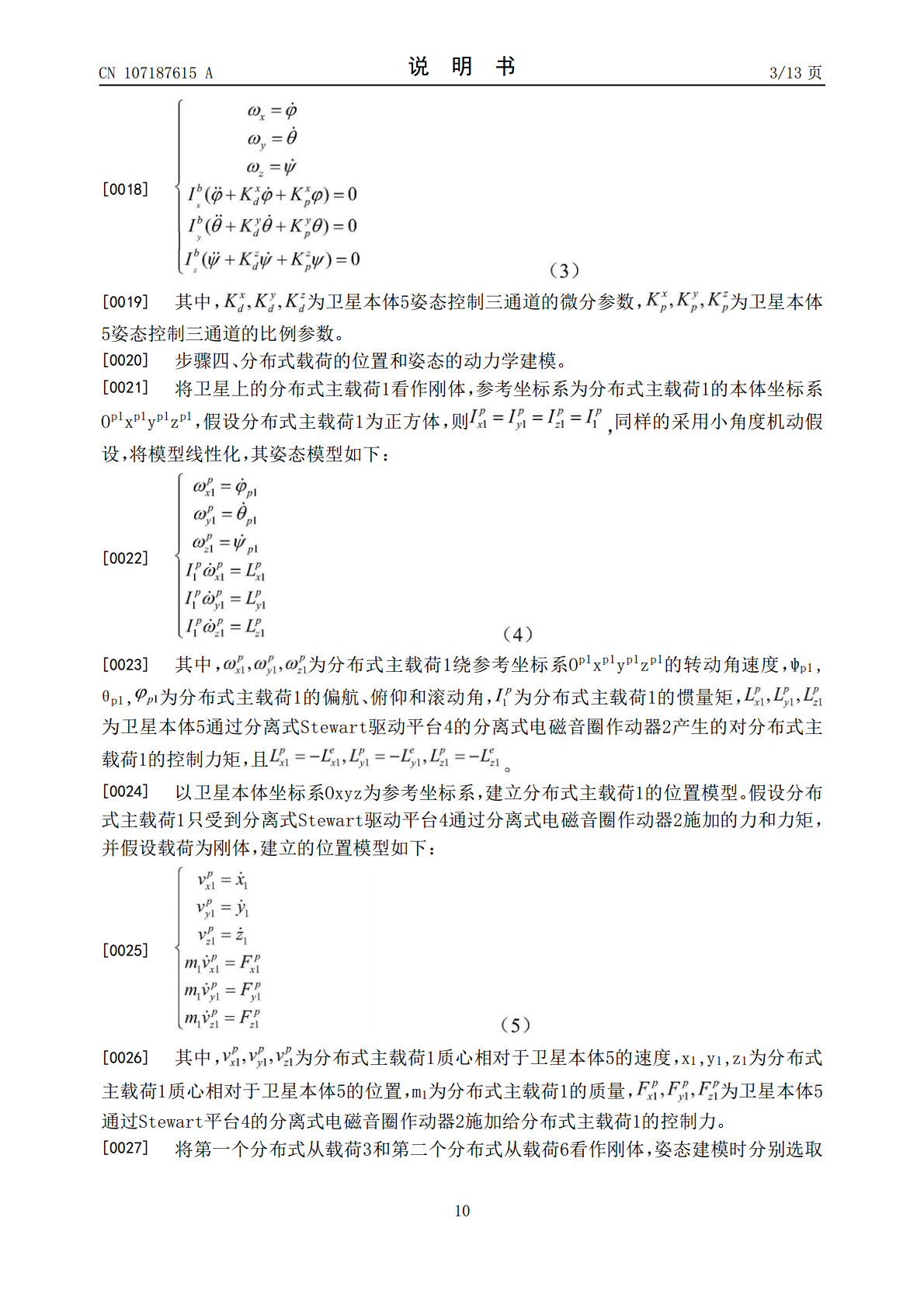
本发明公开了一种卫星分布式载荷的编队方法,用于解决现有卫星自主编队飞行控制方法控制精度低的技术问题。技术方案是根据任务需求不同,在同一颗卫星的不同位置处布置分布式载荷,载荷编队由一个主载荷和若干个从载荷组成,编队中所有载荷协同工作,完成给定任务。采用分离式Stewart驱动平台将卫星本体与载荷相连接,分离式电磁音圈作动器代替可伸缩支腿作为执行机构,采用比例微分(PD)控制律,对分布式载荷进行编队控制。该方法满足了分布式光学成像等大口径光学应用系统提出的高精度、高稳定度、超静力学环境等要求,可完成多种空间任

编队卫星碰撞规避方法研究.docx
编队卫星碰撞规避方法研究随着卫星通信和导航技术的不断发展,卫星编队技术已越来越受到人类的重视。卫星编队技术可以大大提高卫星通信和导航的效率和准确性。然而,卫星编队的复杂性也给编队卫星的碰撞规避带来了挑战。如何在高速运行的空间中保证编队卫星之间的安全,成为了卫星技术研究者需要解决的重要问题。首先,为了保证编队卫星的安全,需要对碰撞的危险情况进行分析及风险评估。卫星碰撞的风险评估一般考虑以下几个方面:首先是轨道参数的影响,例如轨道高度、倾角等;其次是卫星运动的影响,例如卫星运动的方向和速度等;还有其他因素,例

卫星编队.doc
(完整word版)卫星编队(完整word版)卫星编队(完整word版)卫星编队1、techsat-21计划AFRL(空军研究实验室)于1998年提出了techsat—21计划旨在开发通过卫星编队飞行构成分布式雷达的相关技术。为具有探测缓慢移动的车辆的能力,通常的做法是利用窄长天线产生窄波束去照射目标,对于相对于地面高速飞行的近地轨道卫星而言,要求天线的直径要达到几十米甚至数百米才行。分布式雷达可以完成这一任务:每颗卫星发射一种与其它卫星的信号正交的信号,同时接收监测编队中所有卫星所发射信号(包括它自己发出

基于HLA的小卫星编队分布式仿真研究的综述报告.docx
基于HLA的小卫星编队分布式仿真研究的综述报告随着卫星技术的不断发展和应用,小卫星编队技术越来越受到关注和研究。小卫星编队是指多个卫星通过协同作用,形成一定的空间拓扑结构,在共同完成任务的过程中相互配合。基于高级概念(HLA)的小卫星编队分布式仿真研究,是为了实现小卫星编队中的动态同步、数据共享和协同作用,并能够保证地面试验与实际卫星系统之间的一致性,具有重要的理论意义和应用价值。一、小卫星编队的动态同步在小卫星编队中,同步是保证系统工作正常的重要因素。HLA为分布式仿真提供了协作机制,同时也能够提供一种

分布式精密编队卫星相对位姿测量技术综述.docx
分布式精密编队卫星相对位姿测量技术综述引言随着卫星应用的快速发展,通信、导航、遥感等领域的需求也越来越高,对编队卫星技术的要求也越来越高。精密编队卫星技术是一项重要的研究内容,它可以实现多颗卫星之间的协作与配合,提高卫星的任务执行效率,拓展应用领域。同时,精密编队卫星技术的成熟度也会影响导航和通信等领域的发展水平。在编队卫星中,相对位姿测量技术是实现精密控制的关键技术之一。本文将分别介绍常用的相对位姿测量方式及其优劣势,并对分布式精密编队卫星相对位姿测量技术进行综述。一、常用的相对位姿测量方式及分析1.观