
一种基于轮廓的建筑物点云模型底图配准方法.pdf

猫巷****提格


1/10

2/10

3/10

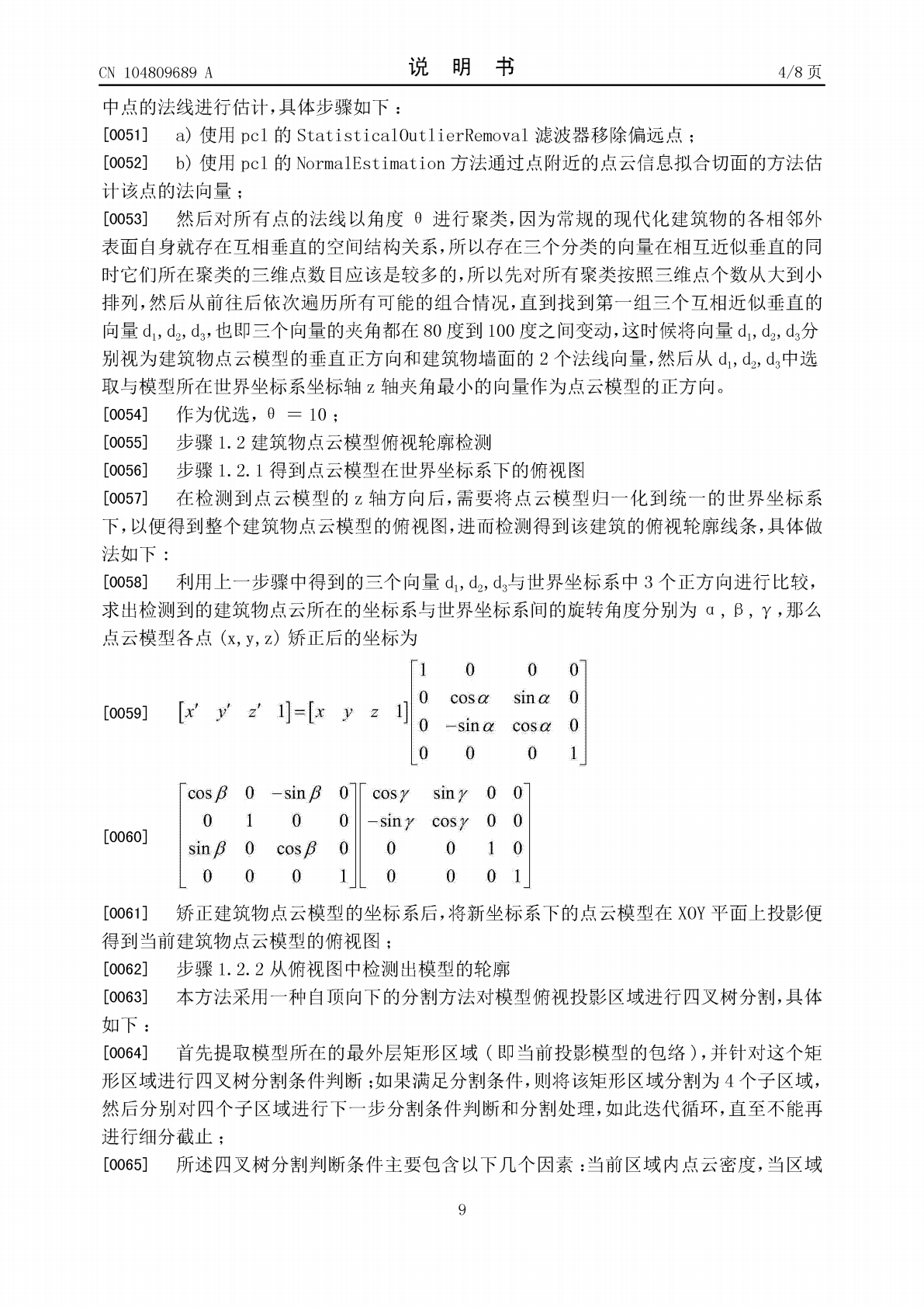
4/10

5/10

6/10

7/10

8/10
9/10

10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种基于轮廓的建筑物点云模型底图配准方法.pdf
本发明涉及一种基于轮廓的建筑物点云模型底图配准方法,属于计算机视觉技术领域。本发明方法通过对三维重建得到的建筑物点云模型进行结构分析,自动检测当前模型的姿态,最终实现点云模型坐标的归一化,并在此基础上得到当前建筑物的点云俯视轮廓线条图;对重建建筑所在区域的遥感图像进行轮廓分析,自动检测得到底图的轮廓线条;根据重建建筑的轮廓线条估计当前建筑的结构拐点,然后借助轮廓匹配信息实现点云模型与卫星底图间的空间对齐,得到从点云模型到卫星底图间的映射矩阵,自动实现建筑物点云模型在卫星底图上的放置。对比现有技术,本发明方
一种基于分布的点云配准方法.pdf
本发明公开一种基于分布的点云配准方法,主要由点云特征提取模块、注意力重叠部分识别模块、点云分布式配准模块构成,用于存在部分重叠的点云配准任务中。其中点云特征提取模块使用RRI算法提取点云旋转不变描述子;注意力识别模块由GNN网络、多头自注意力模块、多头交叉注意力模块构成。学习点云的几何特征和全局特征,有效地识别源点云与目标点云的重叠点;点云分布式配准模块由三层全连接构成,得到点云的GMM分布参数用于点云配准计算,得到源点云与目标点云的旋转矩阵和平移矩阵。本发明可以应用于基于三维点云的定位与重建任务中。

一种基于激光扫描的点云配准方法.pdf
本发明属于三维重建技术领域,具体涉及一种基于激光扫描的点云配准方法。本发明通过体素滤波实现扫描点云数据的精简,减少数据运算量。在点云特征点提取过程中,利用区域分块和法线差异特征进特征点提取,使得提取的特征点可以很好保留点云的几何特征,并在点云模型上分布较为均匀。在点云精配准过程中,利用特征点进行配准,提高点云搜索效率,加快配准速度。针对激光扫描得到得点云数据同一位置点的偏移问题,利用点到面的迭代最近邻点算法进行配准,通过点云到对应点切平面的最小距离构建点对面的匹配误差函数。并且通过法向量夹角约束剔除错误点
一种基于神经网络重建高斯混合模型的点云配准方法.pdf
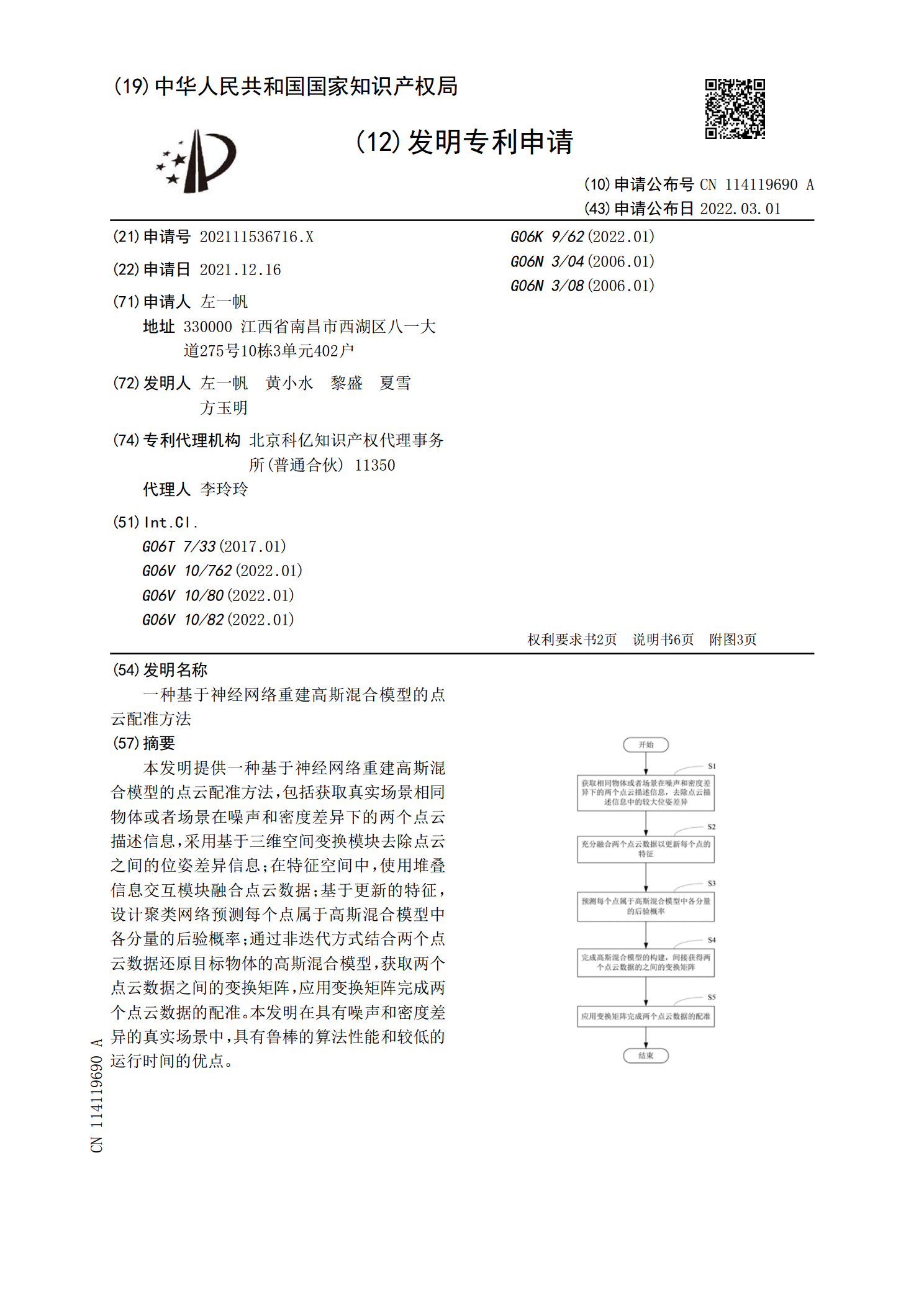
本发明提供一种基于神经网络重建高斯混合模型的点云配准方法,包括获取真实场景相同物体或者场景在噪声和密度差异下的两个点云描述信息,采用基于三维空间变换模块去除点云之间的位姿差异信息;在特征空间中,使用堆叠信息交互模块融合点云数据;基于更新的特征,设计聚类网络预测每个点属于高斯混合模型中各分量的后验概率;通过非迭代方式结合两个点云数据还原目标物体的高斯混合模型,获取两个点云数据之间的变换矩阵,应用变换矩阵完成两个点云数据的配准。本发明在具有噪声和密度差异的真实场景中,具有鲁棒的算法性能和较低的运行时间的优点。
一种基于张量投票方法的点云配准方法.pdf
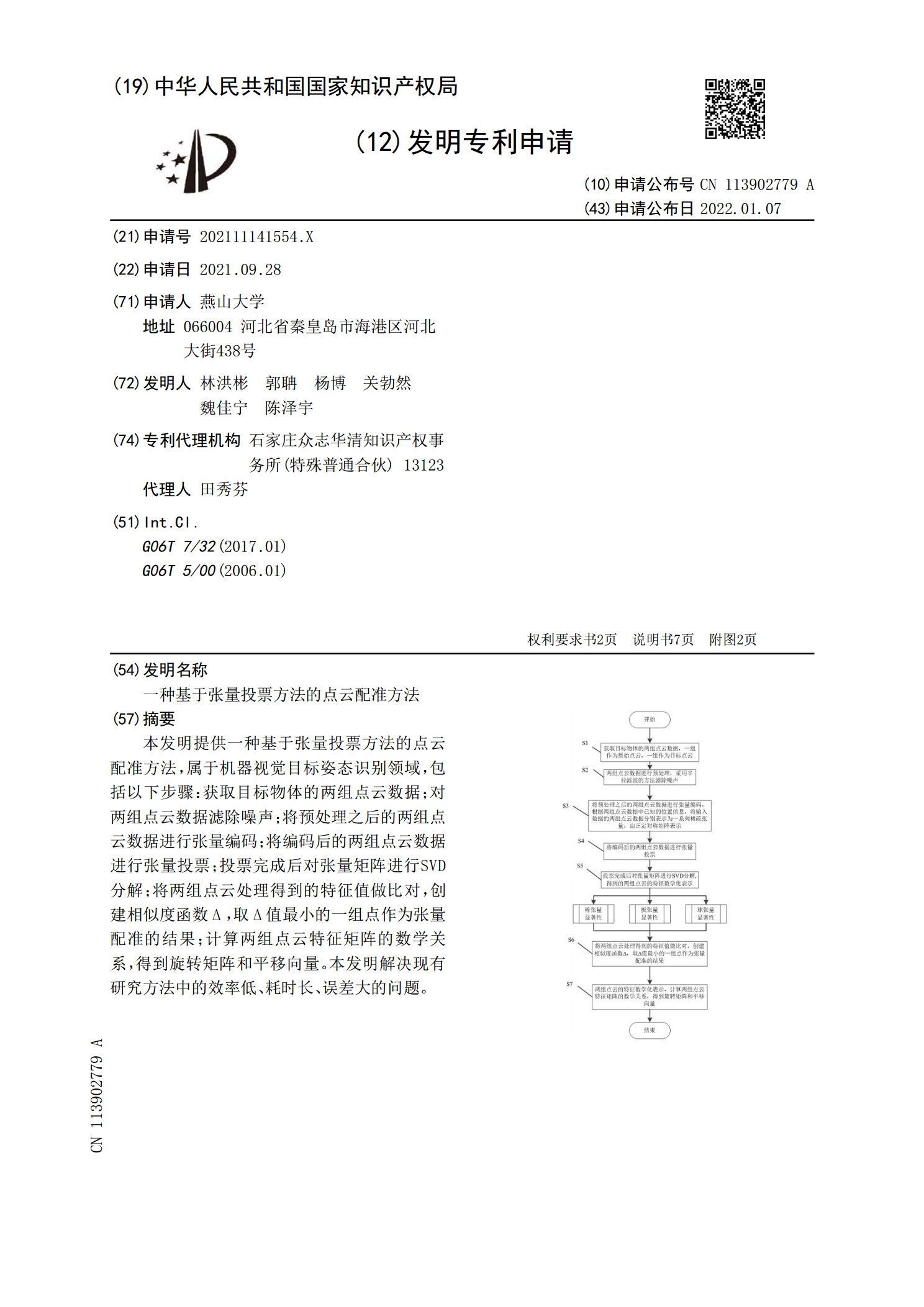
本发明提供一种基于张量投票方法的点云配准方法,属于机器视觉目标姿态识别领域,包括以下步骤:获取目标物体的两组点云数据;对两组点云数据滤除噪声;将预处理之后的两组点云数据进行张量编码;将编码后的两组点云数据进行张量投票;投票完成后对张量矩阵进行SVD分解;将两组点云处理得到的特征值做比对,创建相似度函数∆,取∆值最小的一组点作为张量配准的结果;计算两组点云特征矩阵的数学关系,得到旋转矩阵和平移向量。本发明解决现有研究方法中的效率低、耗时长、误差大的问题。