
一种基于张量投票方法的点云配准方法.pdf

俊英****22

1/10
2/10

3/10
4/10

5/10
6/10
7/10

8/10

9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于张量投票方法的点云配准方法.pdf
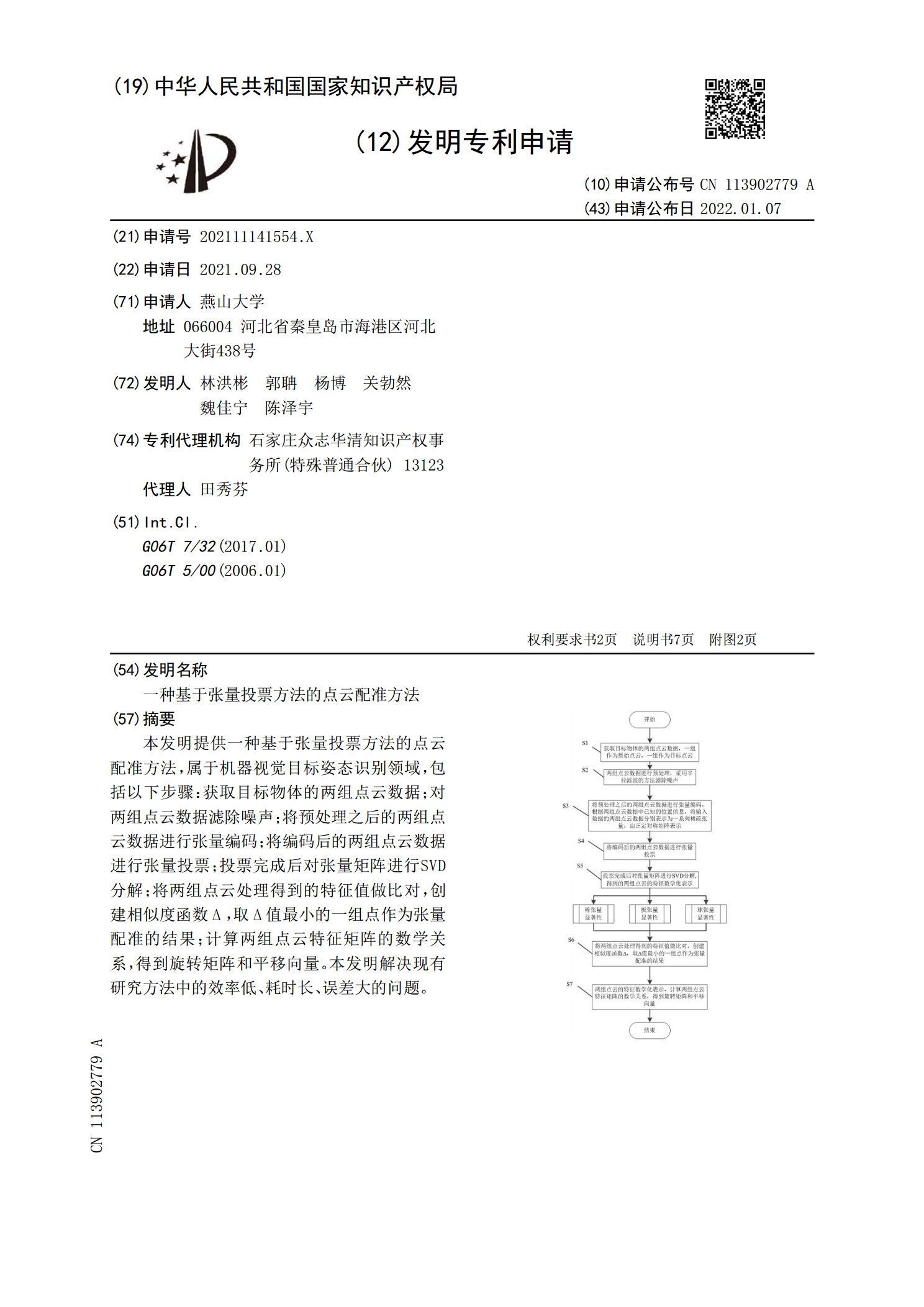
本发明提供一种基于张量投票方法的点云配准方法,属于机器视觉目标姿态识别领域,包括以下步骤:获取目标物体的两组点云数据;对两组点云数据滤除噪声;将预处理之后的两组点云数据进行张量编码;将编码后的两组点云数据进行张量投票;投票完成后对张量矩阵进行SVD分解;将两组点云处理得到的特征值做比对,创建相似度函数∆,取∆值最小的一组点作为张量配准的结果;计算两组点云特征矩阵的数学关系,得到旋转矩阵和平移向量。本发明解决现有研究方法中的效率低、耗时长、误差大的问题。

一种基于张量投票的CAD模型配准方法.docx
一种基于张量投票的CAD模型配准方法基于张量投票的CAD模型配准方法摘要:随着计算机辅助设计(CAD)的广泛应用,CAD模型的配准问题成为一个重要的研究领域。本文提出了一种基于张量投票的CAD模型配准方法。通过将CAD模型表示为三维张量,该方法能够在保留模型几何信息的同时,克服传统方法中由于规模缩放、旋转和平移等变换带来的配准问题。通过实验验证,本文所提出的方法在多个数据集上展示了较高的配准准确性和鲁棒性。关键词:CAD模型,配准,张量投票1.引言计算机辅助设计(CAD)在现代设计和制造过程中扮演着重要角
一种基于分布的点云配准方法.pdf
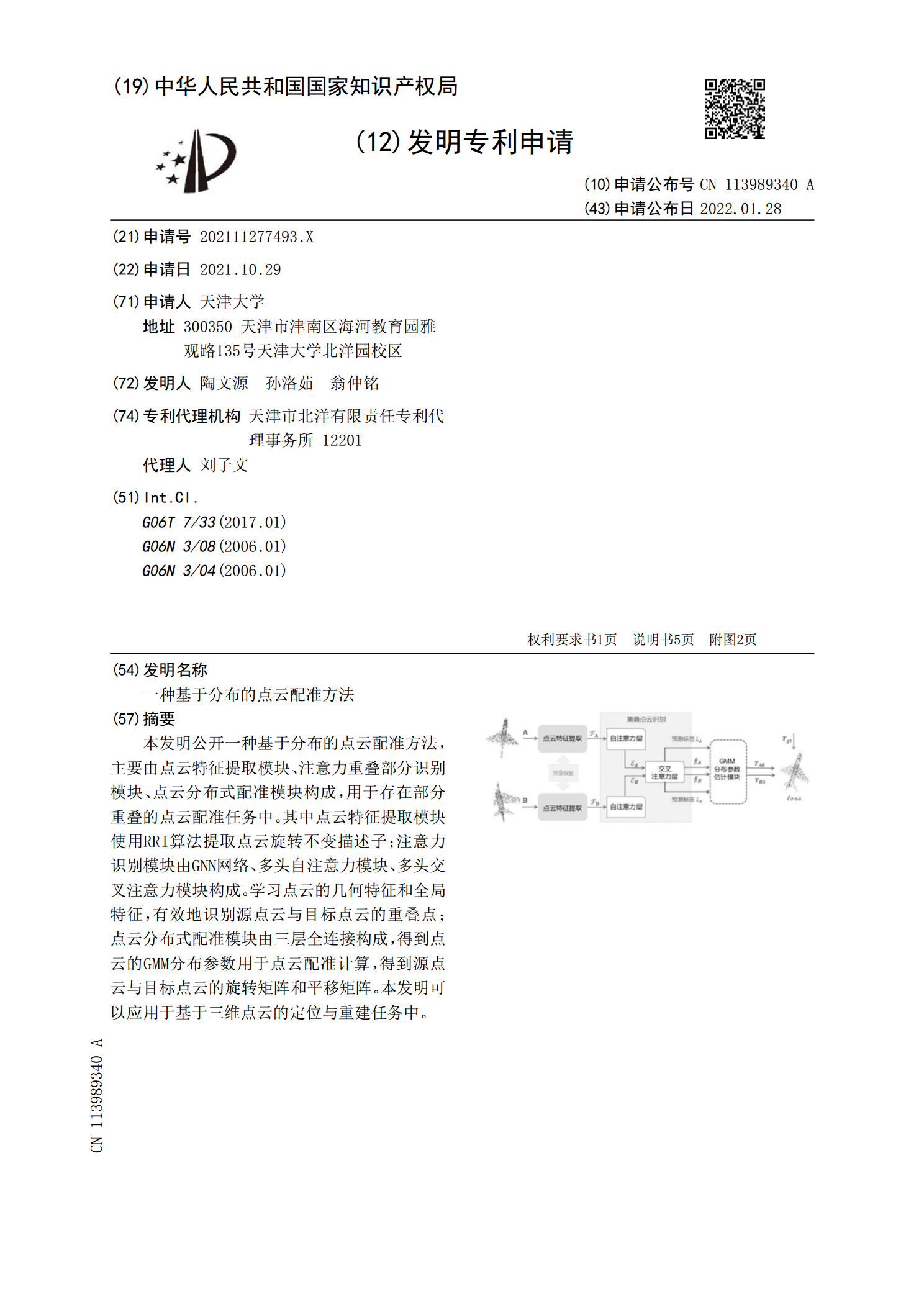
本发明公开一种基于分布的点云配准方法,主要由点云特征提取模块、注意力重叠部分识别模块、点云分布式配准模块构成,用于存在部分重叠的点云配准任务中。其中点云特征提取模块使用RRI算法提取点云旋转不变描述子;注意力识别模块由GNN网络、多头自注意力模块、多头交叉注意力模块构成。学习点云的几何特征和全局特征,有效地识别源点云与目标点云的重叠点;点云分布式配准模块由三层全连接构成,得到点云的GMM分布参数用于点云配准计算,得到源点云与目标点云的旋转矩阵和平移矩阵。本发明可以应用于基于三维点云的定位与重建任务中。

一种基于激光扫描的点云配准方法.pdf
本发明属于三维重建技术领域,具体涉及一种基于激光扫描的点云配准方法。本发明通过体素滤波实现扫描点云数据的精简,减少数据运算量。在点云特征点提取过程中,利用区域分块和法线差异特征进特征点提取,使得提取的特征点可以很好保留点云的几何特征,并在点云模型上分布较为均匀。在点云精配准过程中,利用特征点进行配准,提高点云搜索效率,加快配准速度。针对激光扫描得到得点云数据同一位置点的偏移问题,利用点到面的迭代最近邻点算法进行配准,通过点云到对应点切平面的最小距离构建点对面的匹配误差函数。并且通过法向量夹角约束剔除错误点

基于矩阵指数的点云配准方法.docx
基于矩阵指数的点云配准方法基于矩阵指数的点云配准方法摘要:点云配准是计算机视觉与机器人技术中的重要问题,对于实现三维环境重建、目标识别和导航等应用具有关键性的作用。本文提出了一种基于矩阵指数的点云配准方法,通过将点云转化为矩阵表示,并利用矩阵指数的性质来实现点云之间的配准。实验结果表明,该方法能够有效地实现点云配准,并且具有较高的配准精度和计算效率。关键词:点云配准,矩阵指数,三维环境重建,目标识别,导航1.引言随着三维数据获取和处理技术的发展,点云成为了描述三维场景的重要数据形式。点云配准是将多个点云对