
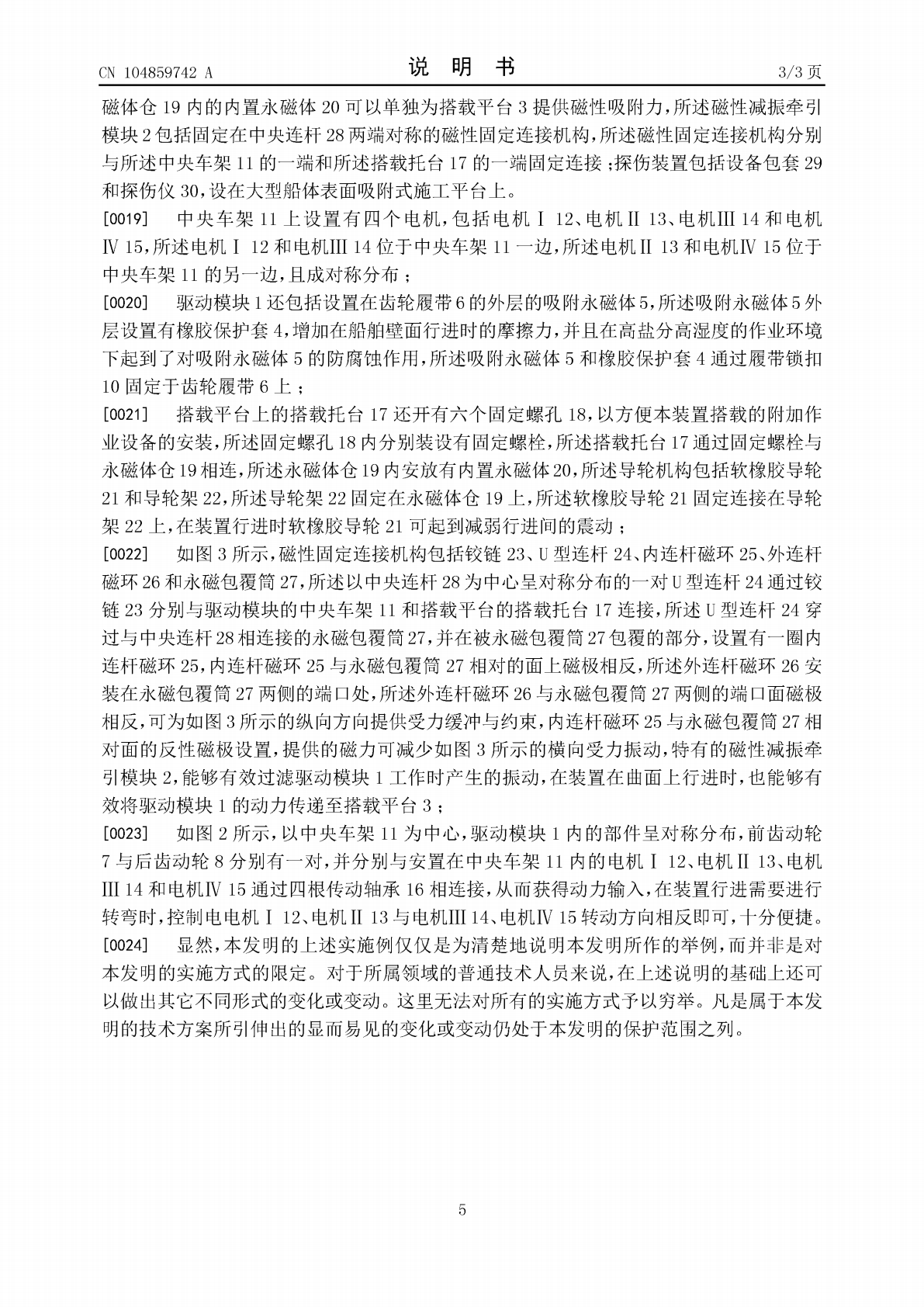
新型船用探伤爬壁机.pdf

猫巷****永安


1/7

2/7

3/7

4/7
5/7

6/7

7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

新型船用探伤爬壁机.pdf
本发明属于船用机器人领域,更具体地说,涉及新型船用探伤爬壁机。其包括驱动模块、磁性减振牵引模块和搭载平台,所述驱动模块通过磁性减振牵引模块与搭载平台连接,所述磁性减振牵引模块位于驱动模块和搭载平台之间,所述驱动模块包括齿轮履带、齿动轮、中央车架和电机,所述搭载平台包括搭载托台、永磁体仓和导轮机构,所述磁性减振牵引模块包括固定在中央连杆两端对称的磁性固定连接机构,所述磁性固定连接机构分别与所述中央车架的一端和所述搭载托台的一端固定连接。本发明结构相对简单,使用简便,易于向船舶制造企业推广,具有很高的商业前景
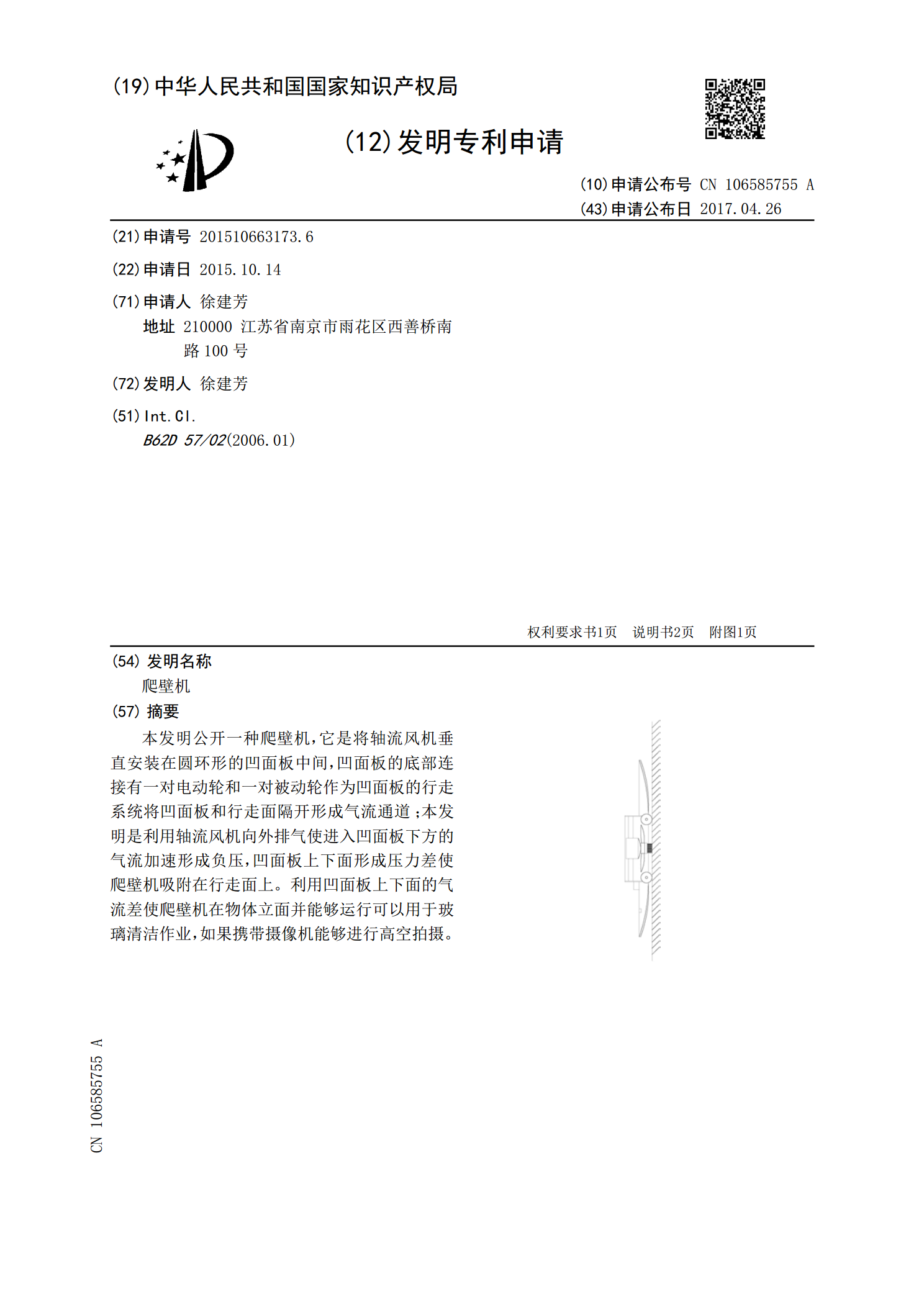
爬壁机.pdf
本发明公开一种爬壁机,它是将轴流风机垂直安装在圆环形的凹面板中间,凹面板的底部连接有一对电动轮和一对被动轮作为凹面板的行走系统将凹面板和行走面隔开形成气流通道;本发明是利用轴流风机向外排气使进入凹面板下方的气流加速形成负压,凹面板上下面形成压力差使爬壁机吸附在行走面上。利用凹面板上下面的气流差使爬壁机在物体立面并能够运行可以用于玻璃清洁作业,如果携带摄像机能够进行高空拍摄。

基于双目视觉的船用爬壁监测机器人.docx
基于双目视觉的船用爬壁监测机器人基于双目视觉的船用爬壁监测机器人摘要:船舶的安全性一直是海事领域的关注焦点之一。传统的目视巡检和手动检查方法存在效率低、检测不全面等问题。为了提高船舶爬壁监测的效率和准确性,本文基于双目视觉技术设计了一种船用爬壁监测机器人。该机器人能够通过双目视觉系统获取壁面图像,并通过图像处理算法进行分析和识别,从而实现对船壁状况的检测和监测。实验证明,该机器人具有良好的监测精度和实用性,可以大大提高船舶维护和管理的效率。关键词:双目视觉;船用爬壁监测机器人;图像处理;监测精度;效率1.

一种船用全向移动爬壁机器人.pdf
本发明的船用全向移动爬壁机器人,包括车架、车轮、车轮电机、二轴电控云台和前臂辅助机构,特征在于:车架四周底部设置有与船舶上的钢板产生吸附磁力的永磁铁,二轴电控云台上固定有用于对爬壁机器人的重力进行抵消的涵道螺旋桨,二轴电控云台上固定有驱使涵道螺旋桨转动的螺旋桨电机;前臂辅助机构经连接轴设置于车架的前端,前臂辅助机构的两侧设置有履带。本发明的爬壁机器人,在永磁铁与船舶钢板之间的吸附磁力、涵道螺旋桨对重力的抵消、前臂辅助机构对下一壁面或障碍物的贴合作用下,可实爬壁机器人的全向运动、越障和切换爬行壁面,实现了船

一种TOFD探伤爬壁机器人.pdf
本发明属于特种工业机器人技术领域,涉及一种TOFD探伤爬壁机器人,包括电气部件、爬行部件和探伤部件,电气部件设置在一安装板一侧,爬行部件和探伤部件设置在安装板另一侧,探伤部件能沿平行于安装板的板面进行直线运动;爬行部件包括能吸附于爬行面的吸附体和爬行轮,爬行轮突出于吸附体的吸附表面;本发明能实现TOFD探伤机器人沿着球罐、管壁等曲面进行爬行检测焊接缺陷,且机器人的越障能力强,检测过程机器人定位稳定可靠,提高检测精度,同时还减少人工检测带来的危险,提高检测机器人的环境适应性,扩大检测范围,实现智能化的高标准