
一种可实现被动包络的可变手掌型柔性机械手爪.pdf

mm****酱吖


1/9

2/9

3/9

4/9

5/9

6/9

7/9

8/9

9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种可实现被动包络的可变手掌型柔性机械手爪.pdf
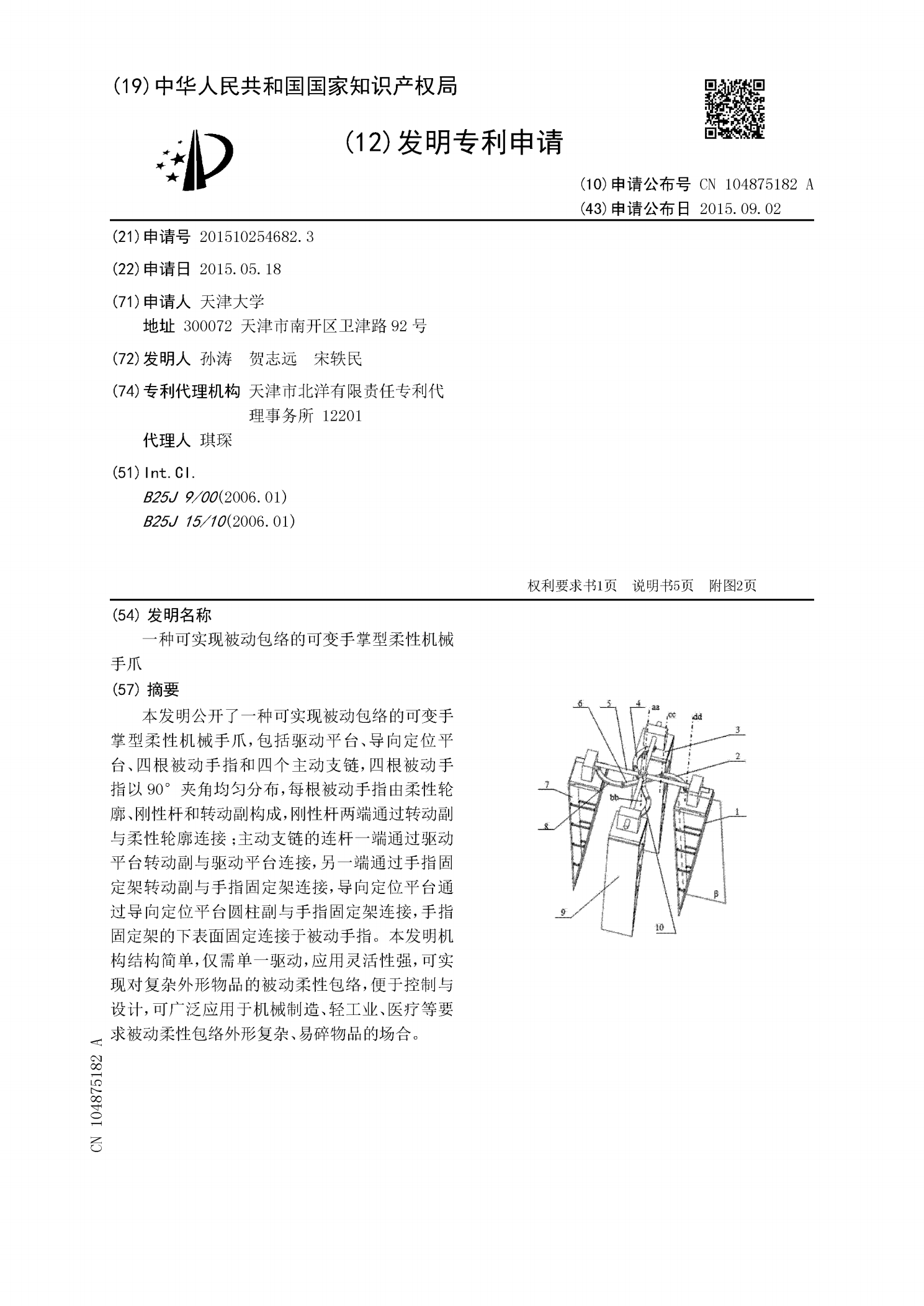
本发明公开了一种可实现被动包络的可变手掌型柔性机械手爪,包括驱动平台、导向定位平台、四根被动手指和四个主动支链,四根被动手指以90°夹角均匀分布,每根被动手指由柔性轮廓、刚性杆和转动副构成,刚性杆两端通过转动副与柔性轮廓连接;主动支链的连杆一端通过驱动平台转动副与驱动平台连接,另一端通过手指固定架转动副与手指固定架连接,导向定位平台通过导向定位平台圆柱副与手指固定架连接,手指固定架的下表面固定连接于被动手指。本发明机构结构简单,仅需单一驱动,应用灵活性强,可实现对复杂外形物品的被动柔性包络,便于控制与设计

一种可实现被动包络的固定手掌型柔性机械手爪.pdf
本发明公开了一种可实现被动包络的固定手掌型柔性机械手爪,包括驱动平台、固定手掌、四根被动手指和四个主动支链,四根被动手指以90°夹角均匀分布,每根被动手指由柔性轮廓、刚性杆和转动副构成,刚性杆两端通过转动副与柔性轮廓连接;主动支链的连接板一端通过驱动平台转动副与驱动平台连接,另一端通过手指固定板转动副与手指固定板的中部连接,手指固定板的内端通过固定手掌转动副与固定手掌的边部连接,手指固定板固定连接于被动手指。本发明机构结构简单,仅需单一驱动,应用灵活性强,可实现对复杂外形物品的被动柔性包络,便于控制与设计

一种可实现被动包络的柔性机械手爪.pdf
本发明公开了一种可实现被动包络的柔性机械手爪,包括驱动平台、从动平台和三根相同的被动手指,三根被动手指以120°夹角均匀分布;每根被动手指由柔性轮廓、刚性杆和转动副构成,多根刚性杆设置在柔性轮廓内部,两端通过转动副与柔性轮廓连接;被动手指的指根部通过第一从动平台转动副连接于从动平台、指中部通过第一驱动平台转动副连接于驱动平台、指尖部伸出于驱动平台外部。本发明的可实现被动包络的柔性机械手爪,其机构结构简单,仅需单一驱动,应用灵活性强,可实现对复杂外形物品的被动柔性包络,便于控制与设计,可广泛应用于机械制造、

一种多目标复合柔性机械手爪.pdf
本发明公开了一种多目标复合柔性机械手爪,包括固定架,固定架内部设有活动架,活动架四周对称连接有连杆,连杆的另一端连接有第二连杆,第二连杆的上部与固定架连接,第二连杆的内侧连接有多组链条组,链条组相对设置,每组链条组包括多根链条,其中,链条组所在平面与第二连杆的纵向横截面垂直,所述链条与第二连杆之间分别通过链条弹簧连接。本发明通过采用多关节链条和弹簧实现了不规则零件的柔性夹持,可以更好地适应零件外形轮廓的变化,并且通过防滑橡胶更好地贴合零件表面,由此可以更好地控制夹持的力度、保证夹持的可靠性、防止对不规则零

自适应柔性机械手爪.pdf
本发明涉及机器人手爪领域,尤其涉及自适应柔性机械手爪,包括固定体和牵引机构,固定体上转动连接有主动齿轮和从动齿轮,主动齿轮和从动齿轮啮合,固定体上设有第一销孔,主动齿轮上设有能够与第一销孔正对的第二销孔;还包括外壳体,外壳体上贯穿有竖向设置的滑槽,固定体竖向滑动连接在滑槽内,滑槽一侧的内壁上设有电磁铁和永磁铁,滑槽另一侧的内壁上设有销腔,电磁铁、永磁铁均与销腔相对,销腔内设有固定销,固定销所在直线能够与第一销孔所在直线重合,固定销靠近于电磁铁的一端具有磁体,磁体与电磁铁的磁性相反,磁体与永磁铁的磁性相同。