
自适应柔性机械手爪.pdf

努力****妙风


1/10

2/10

3/10

4/10
5/10

6/10
7/10

8/10
9/10
10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

自适应柔性机械手爪.pdf
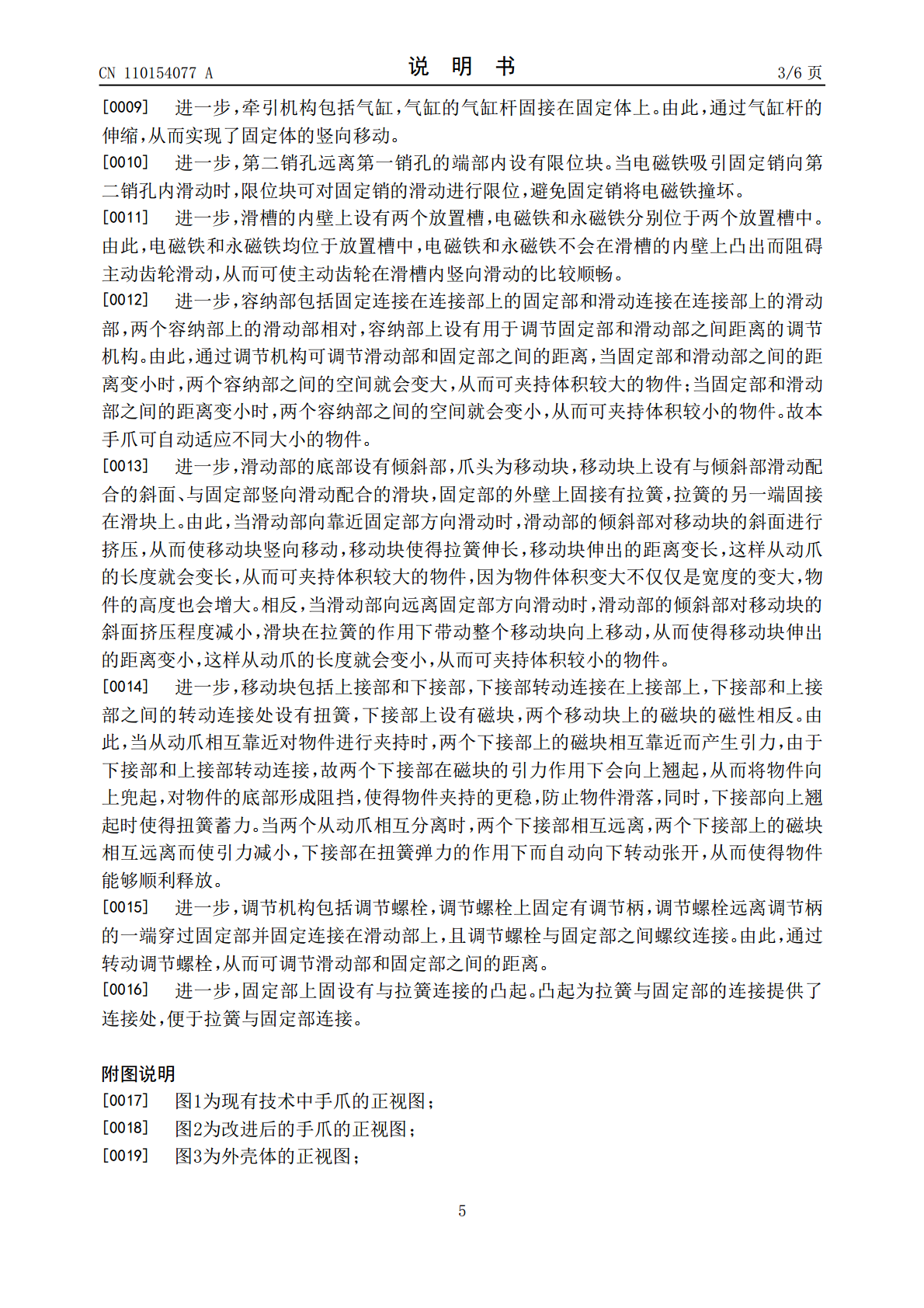
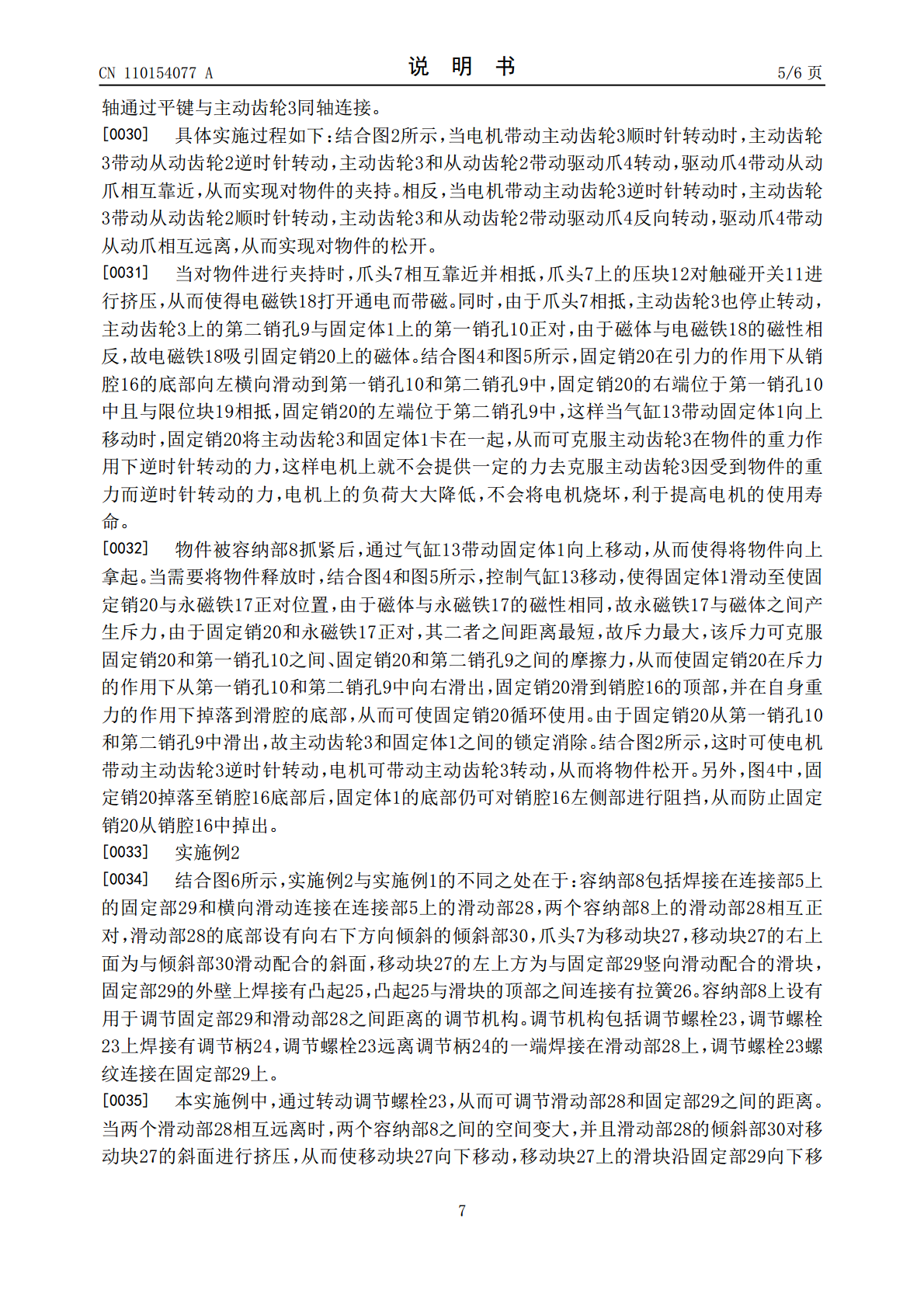
本发明涉及机器人手爪领域,尤其涉及自适应柔性机械手爪,包括固定体和牵引机构,固定体上转动连接有主动齿轮和从动齿轮,主动齿轮和从动齿轮啮合,固定体上设有第一销孔,主动齿轮上设有能够与第一销孔正对的第二销孔;还包括外壳体,外壳体上贯穿有竖向设置的滑槽,固定体竖向滑动连接在滑槽内,滑槽一侧的内壁上设有电磁铁和永磁铁,滑槽另一侧的内壁上设有销腔,电磁铁、永磁铁均与销腔相对,销腔内设有固定销,固定销所在直线能够与第一销孔所在直线重合,固定销靠近于电磁铁的一端具有磁体,磁体与电磁铁的磁性相反,磁体与永磁铁的磁性相同。

一种基于扭转弹簧的自适应柔性手爪及机器人.pdf
本发明涉及连续型机器人技术领域,公开了一种基于扭转弹簧的自适应柔性手爪及机器人。本发明的基于扭转弹簧的自适应柔性手爪包括驱动装置、传动装置以及柔性手指,传动装置包括第一锥齿轮、第二锥齿轮、扭簧以及绞盘轴,第一锥齿轮与驱动装置连接,第二锥齿轮与第一锥齿轮啮合连接,第二锥齿轮套设于锥齿轮轴上,扭簧一端与锥齿轮轴固定连接,另一端与绞盘轴固定连接,柔性手指上设有驱动绳索,驱动绳索缠绕于绞盘轴上,且其自由端与柔性手指的端部固定连接。本发明的机器人包括机器人主体及固设于机器人主体上的上述柔性手爪。本发明的基于扭转弹簧

一种多目标复合柔性机械手爪.pdf
本发明公开了一种多目标复合柔性机械手爪,包括固定架,固定架内部设有活动架,活动架四周对称连接有连杆,连杆的另一端连接有第二连杆,第二连杆的上部与固定架连接,第二连杆的内侧连接有多组链条组,链条组相对设置,每组链条组包括多根链条,其中,链条组所在平面与第二连杆的纵向横截面垂直,所述链条与第二连杆之间分别通过链条弹簧连接。本发明通过采用多关节链条和弹簧实现了不规则零件的柔性夹持,可以更好地适应零件外形轮廓的变化,并且通过防滑橡胶更好地贴合零件表面,由此可以更好地控制夹持的力度、保证夹持的可靠性、防止对不规则零

一种可实现被动包络的柔性机械手爪.pdf
本发明公开了一种可实现被动包络的柔性机械手爪,包括驱动平台、从动平台和三根相同的被动手指,三根被动手指以120°夹角均匀分布;每根被动手指由柔性轮廓、刚性杆和转动副构成,多根刚性杆设置在柔性轮廓内部,两端通过转动副与柔性轮廓连接;被动手指的指根部通过第一从动平台转动副连接于从动平台、指中部通过第一驱动平台转动副连接于驱动平台、指尖部伸出于驱动平台外部。本发明的可实现被动包络的柔性机械手爪,其机构结构简单,仅需单一驱动,应用灵活性强,可实现对复杂外形物品的被动柔性包络,便于控制与设计,可广泛应用于机械制造、

一种应用于球状物体的柔性机械手爪.pdf
本发明公开了一种应用于球状物体的柔性机械手爪,包括底座,底座上从下往上依次安装有电机安装盘和外罩,电机安装盘上安装有电机,电机的输出轴竖直向上伸出并固定连接凸轮盘,凸轮盘上设有第一弧形导向槽和第二弧形导向槽,从第一弧形导向槽的头端到尾端方向上,第一弧形导向槽与凸轮盘中心的距离逐渐增大,通过电机带动凸轮盘转动,进而带动两个销轴分别在对应的第一弧形导向槽和第二弧形导向槽内滑动,且由于滑槽的导向作用,销轴便会带动对应的滑块在滑槽内做直线滑动,从而实现对物体的夹紧或松开。本发明优点:通过特殊结构的弧形导向槽,配合