
meanshift目标跟踪算法PPT.pptx

胜利****实阿

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共35页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

meanshift目标跟踪算法PPT.pptx
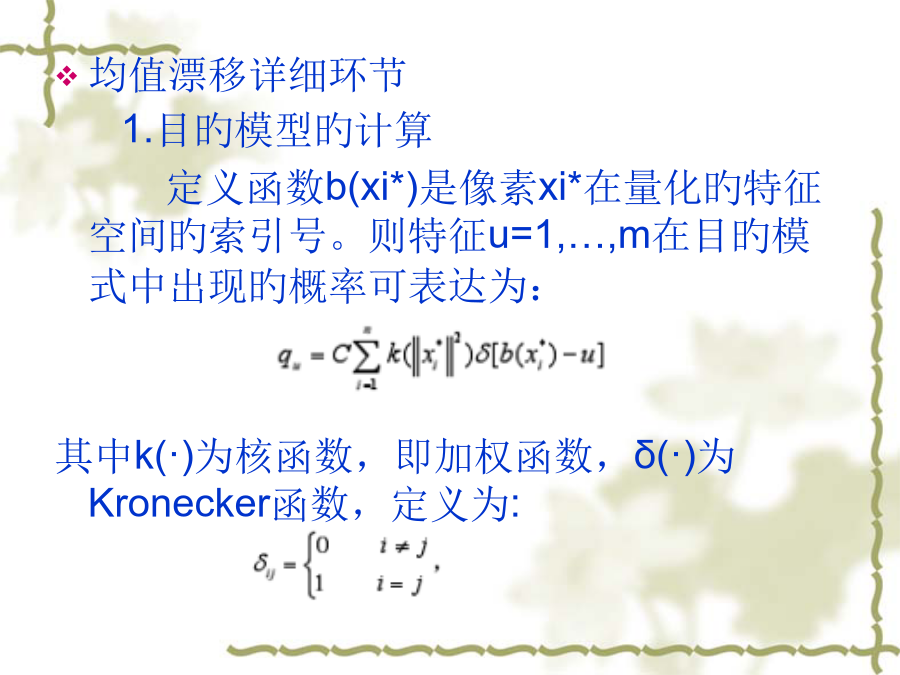
目的跟踪——meanshift应用背景1.智能监控2.道路监控系统3.人机交互4.精确制导系统5.医学诊疗常用措施静态背景下1.时域差分法2.背景差分法3.光流场法动态背景下1.匹配块法2.光流估计法3.图像匹配法4.运动估计法动态背景下旳常用算法1.卡尔曼滤波根据物理学中运动方程来估计目旳旳位置2.均值漂移根据模板匹配旳措施来估计目旳位置3.粒子滤波均值漂移概述均值漂移是由Fukunaga1975年提出旳一种块匹配旳措施图象分割、目旳检测、视频跟踪核估计简介设X1,X2,…Xn是从总体中抽出旳独立同分布

基于MeanShift算法的目标跟踪.pdf
基于MeanShift算法的目标跟踪1算法描述1.1meanshift算法背景meanShift这个概念最早是由Fukunage在1975年提出的,Fukunage等人在一篇关于概率密度梯度函数的估计中提出这一概念。其最初的含义正如其名:偏移的均值向量;但随着理论的发展,meanShift的含义已经发生了很多变化。如今,我们说的meanShift算法,一般是指一个迭代的步骤,即先算出当前点的偏移均值,然后以此为新的起始点,继续移动,直到满足一定的结束条件。在很长一段时间内,meanShift算法都没有得到
基于Meanshift的灰度目标跟踪新算法.pdf
第!!卷第"期光学技术2345!!/35"%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%"##$年!月&’()*+,(-*./)01-6785%"##$%%文章编号:9##":9;<"("##$)#":#""=:#>基于!"#$%&’()*的灰度目标跟踪新算法!张旭光9,",赵恩良!,王延杰9(95中国科学院长春光学精密机械与物理研究所,长春%9!##!!)("5中国科学院研究生院,北京%9###!?;!5沈阳建筑大学理学院,沈阳%99#9=<)摘%要:6@7ABCDEFG算法是一种非参数密

基于Meanshift算法的实时目标跟踪系统.docx
基于Meanshift算法的实时目标跟踪系统随着计算机视觉技术的发展,目标跟踪已成为近年来研究的热点之一。目标跟踪系统的目的是在一个连续的视频序列中检测和跟踪特定的目标。其中一个常用的算法就是Meanshift算法。本文将介绍Meanshift算法以及基于Meanshift算法的实时目标跟踪系统。一、Meanshift算法Meanshift是一种非参数密度估计算法,它被广泛应用于图像分割和目标跟踪中。Meanshift是一种迭代的方法,用于寻找最优的目标中心点。算法通过寻找概率密度函数高峰的方式来定位目标

基于MeanShift的跟踪学习检测目标跟踪改进算法.docx
基于MeanShift的跟踪学习检测目标跟踪改进算法Title:ImprovedObjectTrackingAlgorithmBasedonMeanShiftforTrackingLearningDetectionAbstract:Objecttrackingiswidelyusedinvariouscomputervisionapplications.TheMeanShiftalgorithmisapopularchoiceforobjecttrackingduetoitssimplicityandef