
视线追踪系统头动状态下的视线落点补偿方法.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

视线追踪系统头动状态下的视线落点补偿方法.docx
视线追踪系统头动状态下的视线落点补偿方法一、引言视线追踪系统已经成为现代生产生活中不可或缺的技术,如虚拟现实、智能安防、人机交互等领域。随着研究的深入,研究者们发现在头部运动状态下的视线落点与静态状态下的视线落点存在差异,这就导致了头动状态下的视线落点补偿方法的提出和研究。本文将详细介绍视线追踪系统头动状态下的视线落点补偿方法。二、头动状态下视线落点的不同头部运动状态下的视线落点与静态状态下的视线落点存在明显的差异,这主要是由于一个人的眼睛和头部在同一空间中的移动造成的。具体表现为:1.视野变化头部运动能

视线追踪方法、装置及系统.pdf
本公开提供了一种视线追踪方法、装置及系统,属于图像处理技术领域。视线追踪方法,包括:利用至少两个摄像头采集观看者观看显示屏幕时的多帧面部图像;利用预先训练的人眼检测模型从当前帧的所述面部图像中分割出左右眼图像;计算当前帧的面部图像与前N帧面部图像中每一面部图像之间的相似度;若当前帧的面部图像与前N帧面部图像中每一面部图像的相似度均不大于预设阈值,利用预先训练的视线识别模型中,检测观看者在显示屏幕上的视线落点位置。本公开的实施例能够提升视线追踪的精度和效率。
视线落点确定方法和装置.pdf
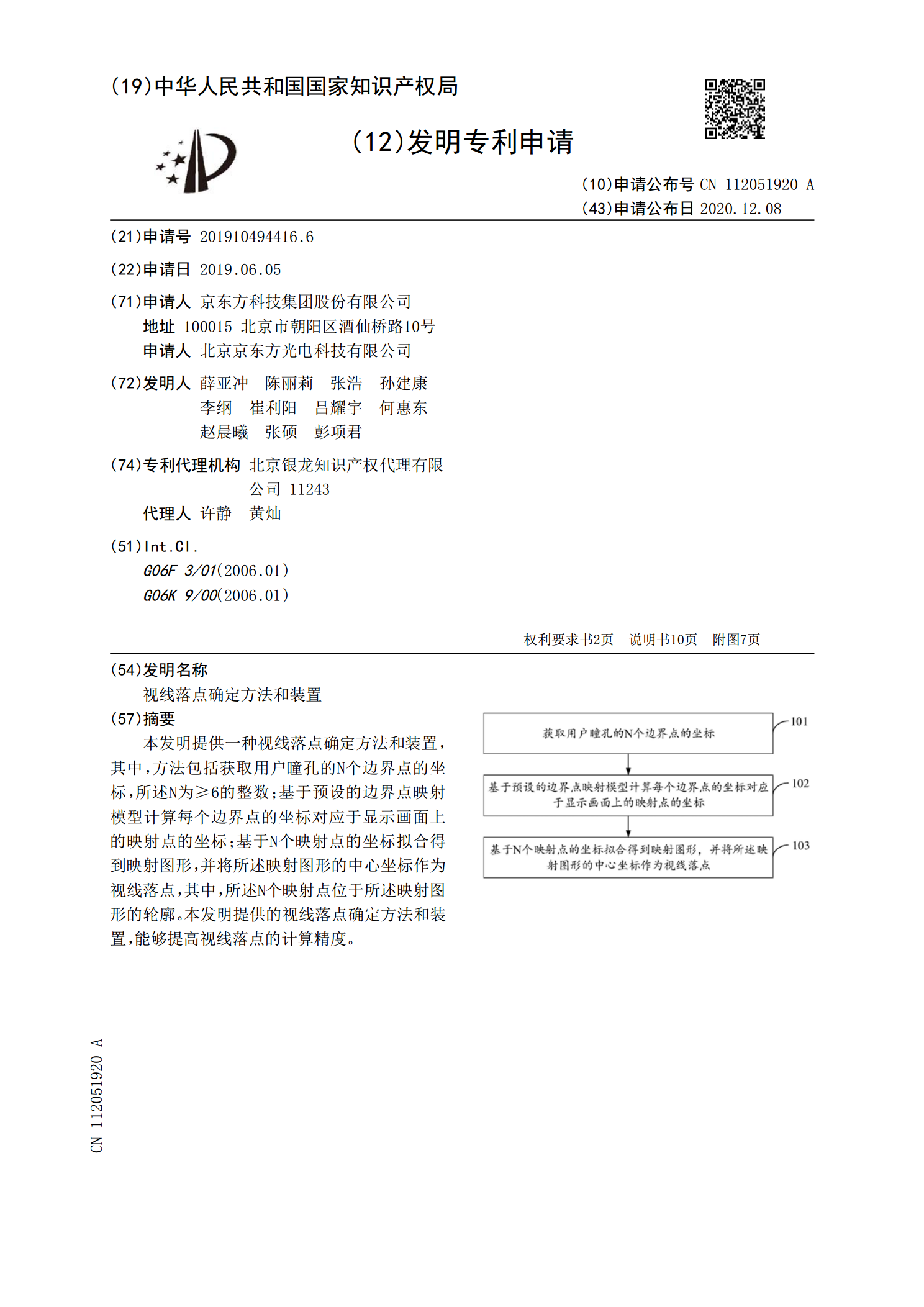
本发明提供一种视线落点确定方法和装置,其中,方法包括获取用户瞳孔的N个边界点的坐标,所述N为≥6的整数;基于预设的边界点映射模型计算每个边界点的坐标对应于显示画面上的映射点的坐标;基于N个映射点的坐标拟合得到映射图形,并将所述映射图形的中心坐标作为视线落点,其中,所述N个映射点位于所述映射图形的轮廓。本发明提供的视线落点确定方法和装置,能够提高视线落点的计算精度。

头戴式眼动追踪系统的视线估计方法研究的开题报告.docx
头戴式眼动追踪系统的视线估计方法研究的开题报告一、选题背景及意义眼动追踪技术一直是研究人类视觉行为、诊断视觉障碍、改善人机交互等领域的重要工具。而传统的眼动追踪技术依赖于头戴式设备,包括外部附加硬件、传感器等,会限制用户的身体活动范围。然而,近年来随着计算机视觉与深度学习的发展,基于摄像头的非侵入式眼动追踪技术逐渐受到关注,能够摆脱传统设备束缚,极大地丰富了眼动追踪技术的应用场景。头戴式眼动追踪系统在使用过程中有时会因为外形体积较大等因素造成用户的不适,这种情况已经受到了广泛的关注和研究。而基于视线估计的

一种视线追踪方法及其系统.pdf
本发明提供一种视线追踪方法及其系统,在预设区域内的预设位置上设置参照物;获取双眼看着参照物时的双眼图像,记为第一类图像;将预设位置的坐标及对应的第一类图像形成数据集,将数据集输入骨干神经网络函数进行训练,得到训练后的模型;将接收到的第二类图像输入模型中,输出第二类图像对应的双眼坐标;其中,第二类图像为拍摄的双眼图像。本发明提出了一种新的视线追踪实现技术,通过在眼镜框架上设置微型摄像头,获取预设区域内预设位置坐标及各预设位置对应的双眼图像,对图像进行神经网络模型的训练,实现端到端的实时眼睛图像获取和位置坐标