
主动动力脚轮组件、全向移动平台及其控制方法.pdf

努力****幻翠


1/10
2/10

3/10

4/10
5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共27页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

主动动力脚轮组件、全向移动平台及其控制方法.pdf
本发明提供了一种主动动力脚轮组件、全向移动平台及其控制方法。该主动动力脚轮组件,包括滚轮、轮轴和轮架,主动动力脚轮组件还包括驱动装置、转向装置和差速装置,驱动装置包括驱动电机和驱动齿轮组,驱动电机带动驱动齿轮组转动控制滚轮滚动;转向装置包括转向电机和转向齿轮组,转向电机带动转向齿轮组转动控制滚轮转向;差速装置包括行星齿轮系,行星齿轮系包括第一齿轮、第二齿轮、行星架和辅助齿轮组,第一齿轮安装在驱动电机的输出轴上,第二齿轮安装在转向电机的输出轴上,行星架的一端与驱动齿轮组连接,行星架的另一端与辅助齿轮组连接,
角度可控动力差速全向轮及其控制方法以及全向移动平台.pdf
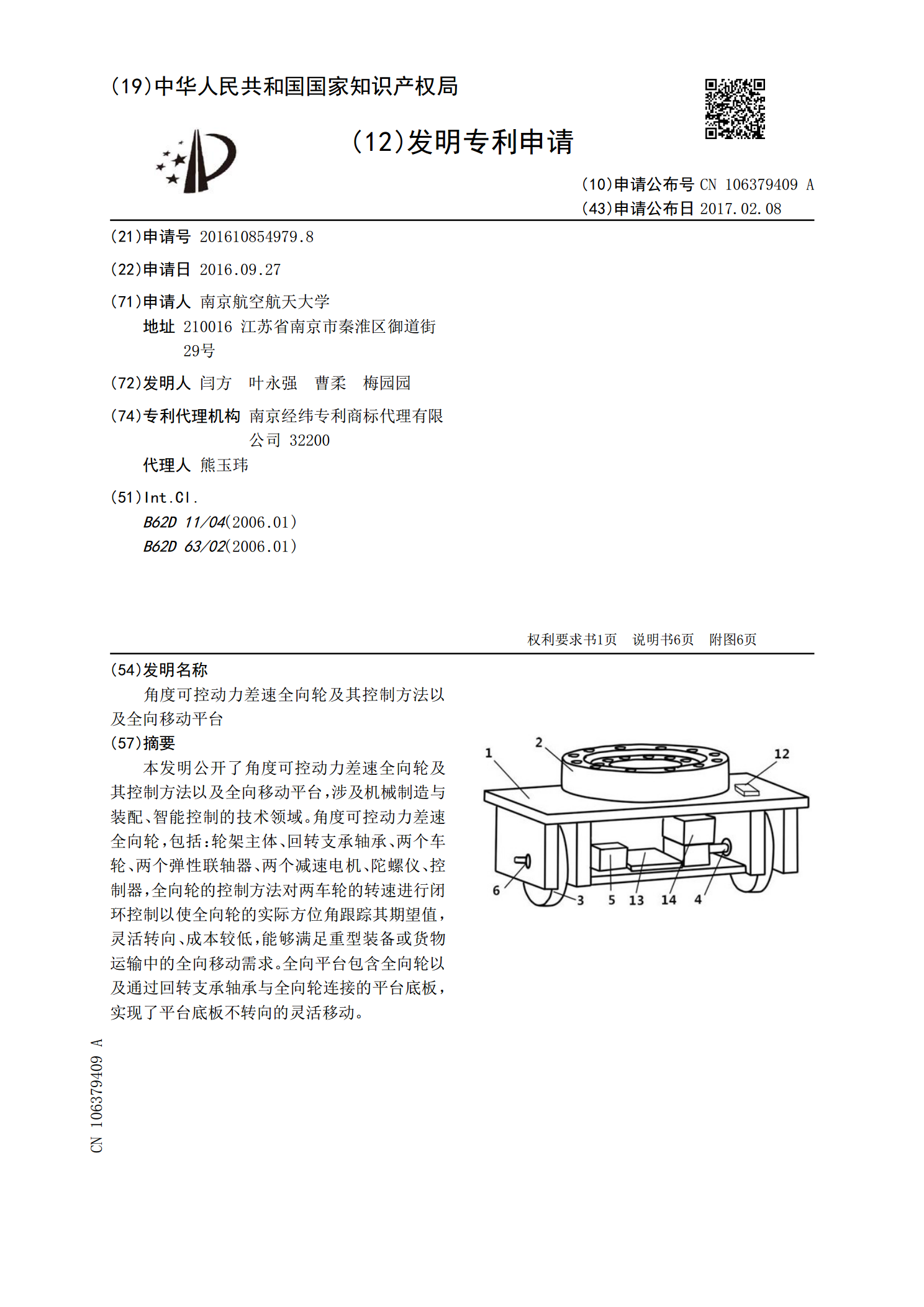
本发明公开了角度可控动力差速全向轮及其控制方法以及全向移动平台,涉及机械制造与装配、智能控制的技术领域。角度可控动力差速全向轮,包括:轮架主体、回转支承轴承、两个车轮、两个弹性联轴器、两个减速电机、陀螺仪、控制器,全向轮的控制方法对两车轮的转速进行闭环控制以使全向轮的实际方位角跟踪其期望值,灵活转向、成本较低,能够满足重型装备或货物运输中的全向移动需求。全向平台包含全向轮以及通过回转支承轴承与全向轮连接的平台底板,实现了平台底板不转向的灵活移动。

动力脚轮及移动平台.pdf
本发明涉及一种动力脚轮及移动平台。该动力脚轮包括齿轮箱、两个驱动件、第一传动轴系、第二传动轴系以及两个滚轮,第一传动轴系、第二传动轴系分别与齿轮箱转动配合且位于齿轮箱内;齿轮箱包括第一齿轮箱、第二齿轮箱以及第三齿轮箱,第二齿轮箱以第一轴线为转动中心与第一齿轮箱转动连接,第三齿轮箱以第二轴线为转动中心与第二齿轮箱转动连接,两个滚轮以第三轴线为转动中心与第三齿轮箱转动连接,第一轴线、第二轴线以及第三轴线两两垂直;两个驱动件固设于第一齿轮箱,其中一个驱动件通过第一传动轴系连接一个滚轮,并用于驱动该滚轮转动;另一

一种移动机器人的双滚轮全向动力脚轮和全向移动平台.pdf
本发明公开了一种移动机器人的双滚轮全向动力脚轮和全向移动平台,包括机架,机架安装有竖直布置并能转动的转向轴,转向轴的下端安装有轮架;轮架设有并排布置并能独立转动的第一滚轮和第二滚轮,第一滚轮的旋转轴心与第二滚轮的旋转轴心重合;机架设有并排布置并独立工作的第一驱动电机和第二驱动电机;第一驱动电机和第二驱动电机分别通过传动机构驱动对应的第一滚轮和第二滚轮转动。本发明驱动电机位于机架,通过传动机构将运动分别传递到两个滚轮,实现两个滚轮的独立运动。无论转向轴位于什么位置,传动比保持不变。同时在轮架转向中不存在线缆

全向移动平台及其动力万向轮.pdf
本发明公开了一种全向移动平台及其动力万向轮。该动力万向轮包括上架体、下架体、滚轮、第一电机以及第二电机。下架体可转动地连接于上架体。滚轮可转动地安装于下架体。第一电机安装于上架体并用于驱动下架体转动。第二电机与滚轮关联以驱动滚轮滚动。下架体的转动与滚轮的滚动分别通过第一电机和第二电机独立控制。本发明的全向移动平台在运行过程中,转向和驱动运动自由度之间无耦合,从而保证在执行转向运动时没有额外的滚轮滚动运动输出,无需进行加入专门的机构去解耦,因此结构简单,并且运行过程中无侧滑,转向运动柔顺,运动控制精度高。