
机器人柔弹性仿生电子皮肤研究进展.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

机器人柔弹性仿生电子皮肤研究进展.docx
机器人柔弹性仿生电子皮肤研究进展机器人柔弹性仿生电子皮肤研究进展摘要:随着机器人技术的进步,为了实现机器人与人类之间的高度交互以及更加灵活的操作能力,研究人员们开始关注于仿生电子皮肤的开发。本论文将综述机器人柔弹性仿生电子皮肤的研究进展,包括其原理、结构设计、感知能力以及应用等方面的最新成果。1.引言机器人的发展已经为人类带来了极大的便利和进步,然而,传统机器人在柔性、触觉和交互方面的能力仍然有限。为了更好地适应不同环境和提供更加智能的服务,研究人员开始关注于仿生电子皮肤的开发。仿生电子皮肤可以模拟人类皮
高柔弹性电子皮肤压力触觉传感器的研究.pptx
汇报人:/目录0102电子皮肤在人机交互领域的应用当前电子皮肤压力触觉传感器的局限性研究目的与意义03材料选择与特性结构设计原理制造工艺流程04性能测试方法与标准性能表现与优化策略实验结果分析与讨论05在人机交互领域的应用前景技术挑战与解决方案未来发展方向06研究结论对未来研究的建议与展望汇报人:

仿生咀嚼机器人弹性颞下颌关节设计与性能分析.docx
仿生咀嚼机器人弹性颞下颌关节设计与性能分析标题:仿生咀嚼机器人弹性颞下颌关节设计与性能分析摘要:随着生物仿生学的快速发展,仿生机器人在各个领域得到了广泛应用。本文针对咀嚼机器人的设计与性能进行了研究。通过对颞下颌关节的仿生设计,实现了机器人咀嚼动作的模拟与优化。在实验中,我们采用了弹性材料模拟颞下颌关节的机械特性,并分析了机器人在咀嚼过程中的性能。结果表明,所设计的咀嚼机器人具有较好的咀嚼动作模拟效果,具有良好的应用前景。1.引言咀嚼是人类日常生活中必不可少的行为之一,同时也是消化过程的起点。仿生机器人是

辐射对称仿生柔体机器人协同推进机理及实现技术.docx
辐射对称仿生柔体机器人协同推进机理及实现技术前言在机器人技术不断发展的今天,机器人的灵活性和适应性已经越来越受到研究人员的重视。仿生机器人技术是机器人技术发展的一个重要方向,它致力于研究如何从自然界中获取灵感,并将其应用于机器人设计和制造中。其中,仿生柔体机器人是仿生机器人技术中的一种重要类型,它拥有类似于生物体的柔软身体和可适应性的运动方式。本文将以辐射对称仿生柔体机器人为例,探讨其协同推进机理及实现技术。一、辐射对称仿生柔体机器人概述辐射对称系统是一种具有球对称性的物理系统,在这种系统中,物质在中心点
一种柔索驱动机器人变刚度弹性关节.pdf
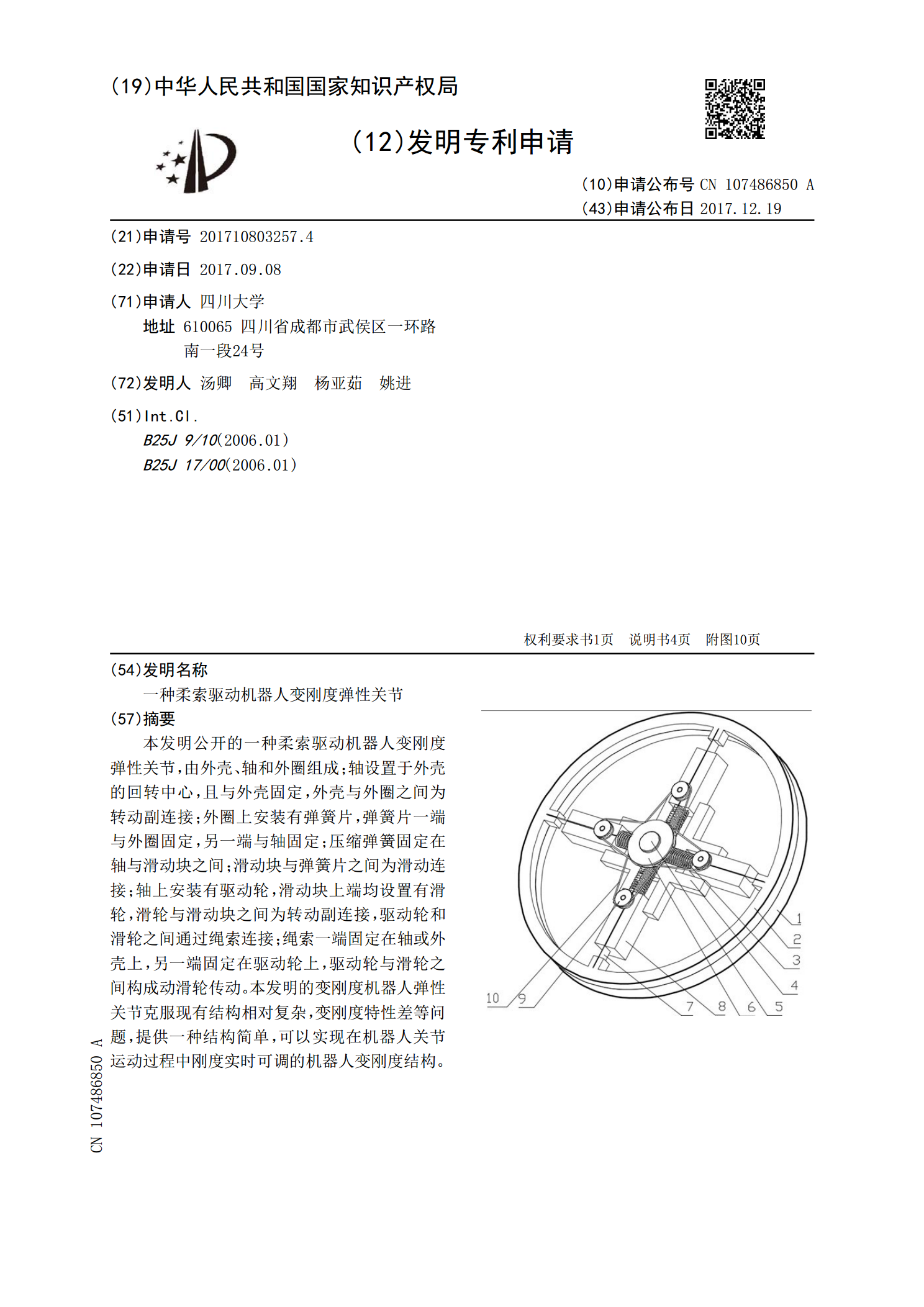
本发明公开的一种柔索驱动机器人变刚度弹性关节,由外壳、轴和外圈组成;轴设置于外壳的回转中心,且与外壳固定,外壳与外圈之间为转动副连接;外圈上安装有弹簧片,弹簧片一端与外圈固定,另一端与轴固定;压缩弹簧固定在轴与滑动块之间;滑动块与弹簧片之间为滑动连接;轴上安装有驱动轮,滑动块上端均设置有滑轮,滑轮与滑动块之间为转动副连接,驱动轮和滑轮之间通过绳索连接;绳索一端固定在轴或外壳上,另一端固定在驱动轮上,驱动轮与滑轮之间构成动滑轮传动。本发明的变刚度机器人弹性关节克服现有结构相对复杂,变刚度特性差等问题,提供一