
智能穿梭堆码机器人的有限元分析与结构优化.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

智能穿梭堆码机器人的有限元分析与结构优化.docx
智能穿梭堆码机器人的有限元分析与结构优化智能穿梭堆码机器人的有限元分析与结构优化随着机器人技术的不断发展,机器人正在成为各个行业中重要的工具。其中,智能穿梭堆码机器人是一种新型的堆码机器人,可以在空间狭小的仓库内快速高效地完成货物的堆垛作业。为了提高穿梭堆码机器人的性能和可靠性,在设计和制造过程中需要进行有限元分析和结构优化。一、智能穿梭堆码机器人结构设计智能穿梭堆码机器人主要包括机械结构、控制系统、电子系统等部分。机械结构是机器人的骨架,由伸缩臂、升降装置、货叉、行走机构等组成。其中,伸缩臂和货叉是机器
智能穿梭堆码机器人.pdf
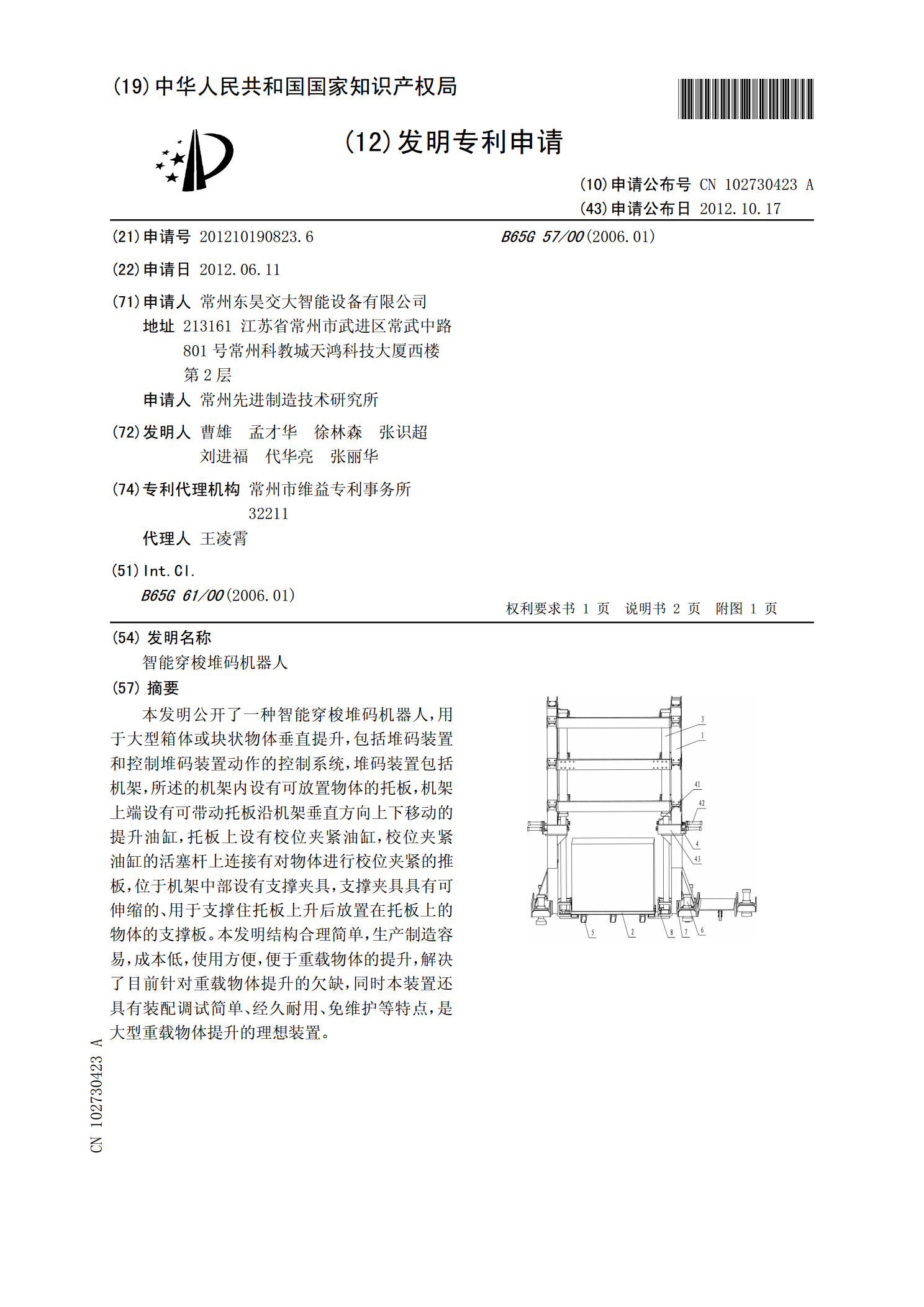
本发明公开了一种智能穿梭堆码机器人,用于大型箱体或块状物体垂直提升,包括堆码装置和控制堆码装置动作的控制系统,堆码装置包括机架,所述的机架内设有可放置物体的托板,机架上端设有可带动托板沿机架垂直方向上下移动的提升油缸,托板上设有校位夹紧油缸,校位夹紧油缸的活塞杆上连接有对物体进行校位夹紧的推板,位于机架中部设有支撑夹具,支撑夹具具有可伸缩的、用于支撑住托板上升后放置在托板上的物体的支撑板。本发明结构合理简单,生产制造容易,成本低,使用方便,便于重载物体的提升,解决了目前针对重载物体提升的欠缺,同时本装置还
智能穿梭车机器人.pdf
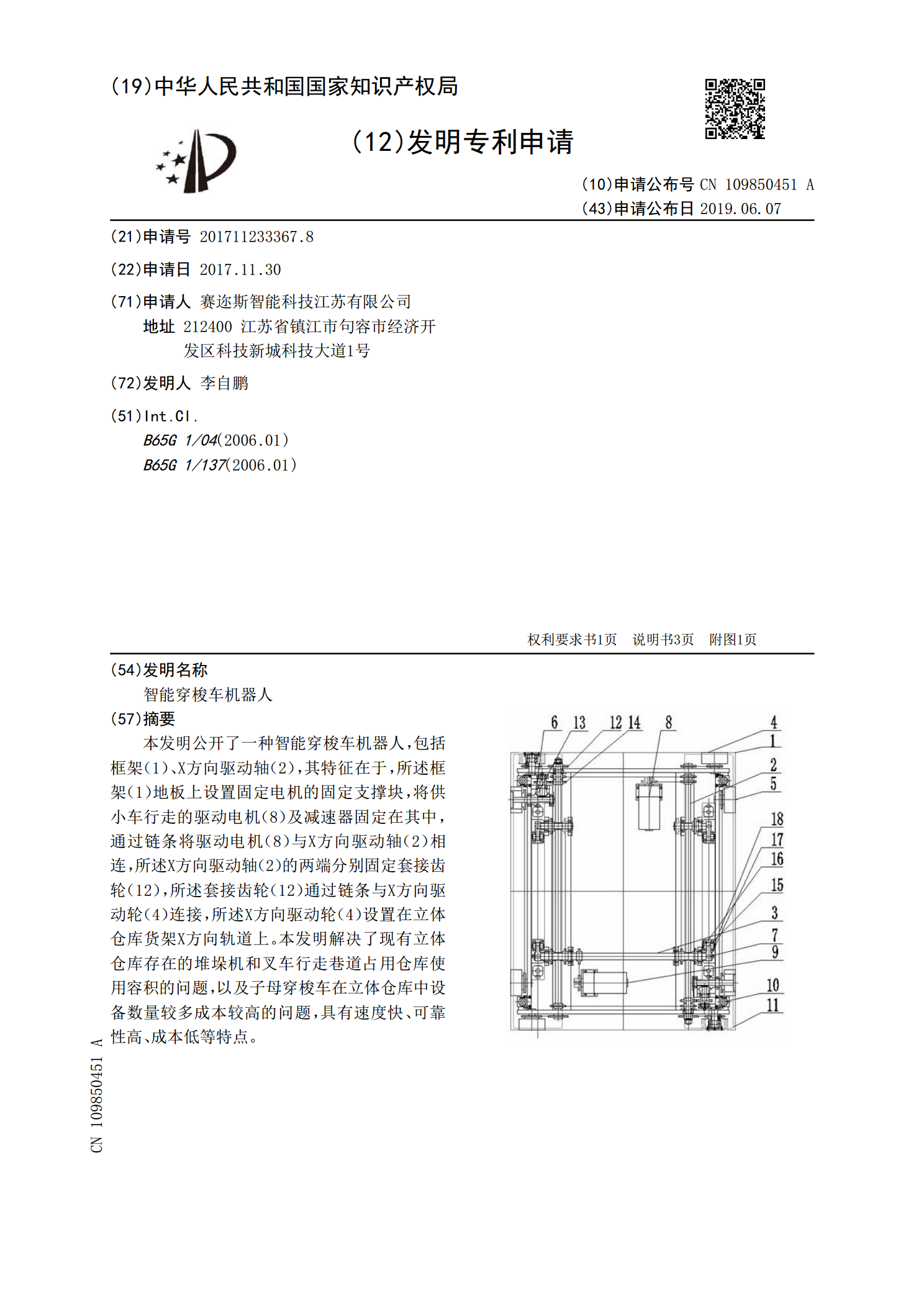
本发明公开了一种智能穿梭车机器人,包括框架(1)、X方向驱动轴(2),其特征在于,所述框架(1)地板上设置固定电机的固定支撑块,将供小车行走的驱动电机(8)及减速器固定在其中,通过链条将驱动电机(8)与X方向驱动轴(2)相连,所述X方向驱动轴(2)的两端分别固定套接齿轮(12),所述套接齿轮(12)通过链条与X方向驱动轮(4)连接,所述X方向驱动轮(4)设置在立体仓库货架X方向轨道上。本发明解决了现有立体仓库存在的堆垛机和叉车行走巷道占用仓库使用容积的问题,以及子母穿梭车在立体仓库中设备数量较多成本较高的

智能穿梭车结构及其伺服控制系统的设计优化的开题报告.docx
智能穿梭车结构及其伺服控制系统的设计优化的开题报告一、选题背景随着物流、制造业等领域的快速发展,各种物流设备的运用也得到了越来越广泛的应用。智能穿梭车是物流设备中的一种新型智能机器人设备,其具有快速、高效、低噪、低碳、环保等优点,大大提高了物流运输效率。智能穿梭车作为一种新型自动化设备,不仅需要具备一定的机械结构设计能力,更需要具备一定的临时控制能力。因此,智能穿梭车结构及其伺服控制系统的设计与优化保证了智能穿梭车的高效运作。二、选题意义智能穿梭车作为一种自动化设备,可以在物流、制造等行业中快速、高效地进

智能穿梭车结构及其伺服控制系统的设计优化的任务书.docx
智能穿梭车结构及其伺服控制系统的设计优化的任务书设计任务书:智能穿梭车结构及其伺服控制系统的设计优化任务背景智能穿梭车是一种高效、智能的物料运输设备,广泛应用于物流仓储、工厂生产线等场景。智能穿梭车通常采用激光导航、RFID识别等技术进行导航定位,通过伺服系统进行精确定位、运动控制,从而实现物料的快速、准确、无人值守运输。智能穿梭车结构和伺服控制系统的设计优化能够提升其运输效率和自动化水平,降低运维成本和维修难度,具有重要的实用价值和研究意义。设计目标本设计任务旨在设计优化智能穿梭车的结构和伺服控制系统,