
基于陀螺仪的炮塔角速度测量装置的设计.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于陀螺仪的炮塔角速度测量装置的设计.docx
基于陀螺仪的炮塔角速度测量装置的设计摘要:本文设计了一种基于陀螺仪的炮塔角速度测量装置。该装置采用MEMS陀螺仪作为传感器,通过将陀螺仪输出的电压信号转换为角速度信号,并利用微控制器进行信号处理,实现对炮塔角速度的精确测量。实验结果表明,该装置测量精度高,稳定性良好,可以满足实际应用需求。关键词:陀螺仪;角速度;炮塔;测量装置;微控制器1.引言炮塔作为重型机械设备的核心部件之一,其转动角速度的测量对于保障设备的安全运行至关重要。目前市面上有多种测量炮塔角速度的传感器,包括光电编码器、霍尔传感器、陀螺仪等。
角速度测量装置以及相对角速度测量装置.pdf
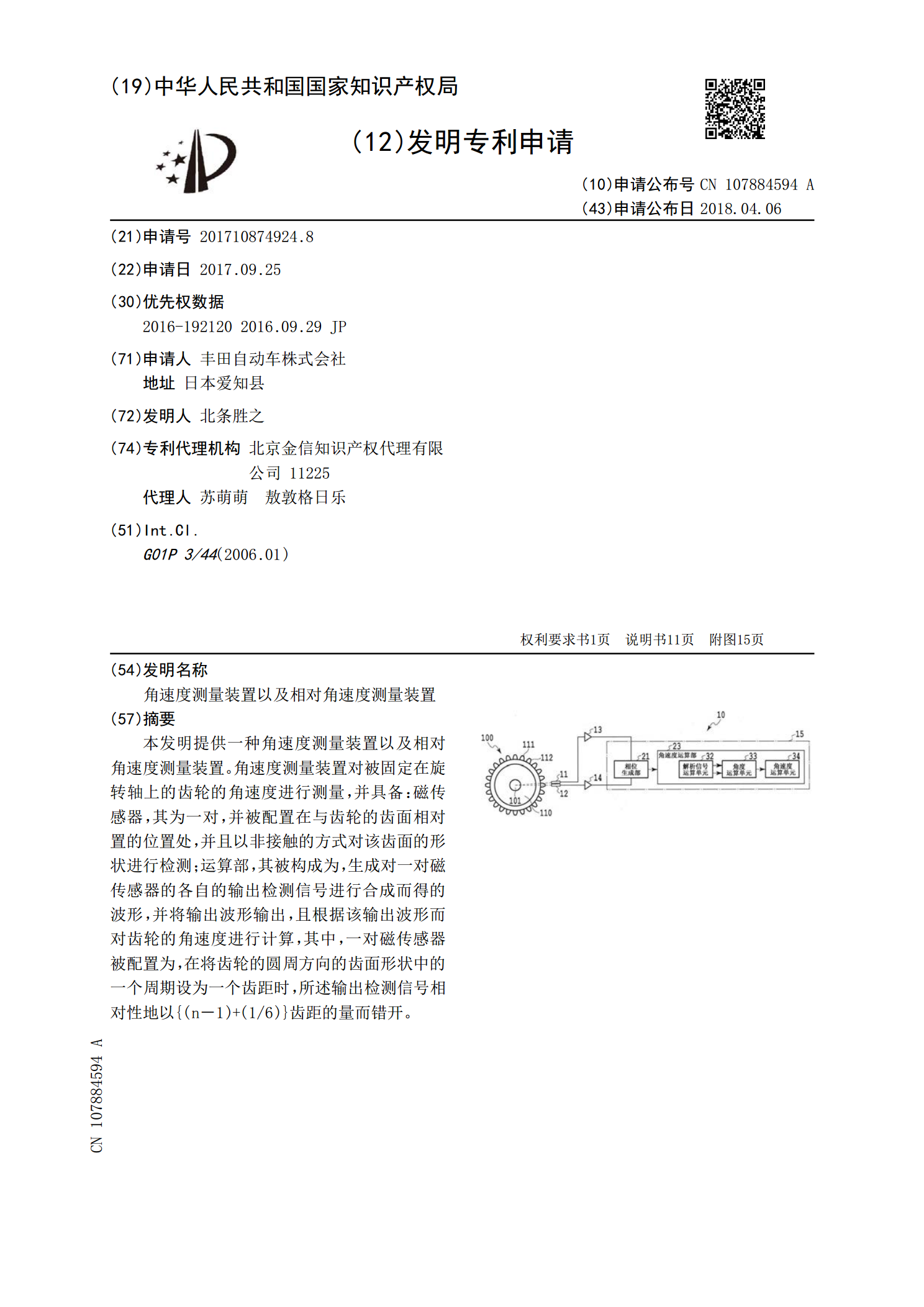
本发明提供一种角速度测量装置以及相对角速度测量装置。角速度测量装置对被固定在旋转轴上的齿轮的角速度进行测量,并具备:磁传感器,其为一对,并被配置在与齿轮的齿面相对置的位置处,并且以非接触的方式对该齿面的形状进行检测;运算部,其被构成为,生成对一对磁传感器的各自的输出检测信号进行合成而得的波形,并将输出波形输出,且根据该输出波形而对齿轮的角速度进行计算,其中,一对磁传感器被配置为,在将齿轮的圆周方向的齿面形状中的一个周期设为一个齿距时,所述输出检测信号相对性地以{(n-1)+(1/6)}齿距的量而错开。

一种基于旋转多普勒效应的物体角速度测量装置.pdf
本发明涉及一种基于旋转多普勒效应的物体角速度测量装置,包括激光器、准直扩束透镜、相位型空间光调制器、计算机、分光棱镜、二次反射直角棱镜、聚焦透镜、CCD图像传感器和旋转轴,其中:激光器发出高斯光束,光束经准直扩束透镜扩束准直后照射在相位型空间光调制器上,将计算全息图通过计算机传输到相位型空间光调制器中生成涡旋光束并透射部分高斯光束;两种光束叠加后经分光棱镜透射后沿光轴入射到与旋转轴同步旋转的二次反射直角棱镜上;在其内部经历两次反射后叠加光束经分光棱镜反射后通过聚焦透镜会聚在CCD图像传感器上产生干涉;通过

基于固态原子自旋几何相的光悬浮角速度测量装置与方法.pdf
本发明公开一种基于固态原子自旋几何相的光悬浮角速度测量装置与方法,此装置将光悬浮微型颗粒高速旋转技术应用到金刚石中氮?空位色心固态原子自旋角速度测量系统中,对测量系统进行整体设计,通过光悬浮微型颗粒实现NV色心自旋相对系统部件的独立悬浮旋转,本发明将悬浮激光偏振角动量转化为微型颗粒旋转角动量,进而转化为NV色心几何相累积的,从而实现对微型颗粒质心运动、旋转运动和NV色心几何相三种信号的同步实时检测。同时,本发明中的主要光学器部件均采用光纤式设计,提高了本发明装置的可拓展性、可靠性和便携性。本发明将有利于拓

一种全对称微机电陀螺仪三轴角速度测量系统.pdf
本发明公开了一种全对称微机电陀螺仪三轴角速度测量系统,包括陀螺模块和陀螺控制系统;陀螺模块包括多个陀螺,陀螺控制系统按一定时序控制各个陀螺轮流反转工作模态,解算出陀螺的零偏值,并结合时序和零偏值实时校准各个陀螺的输出,给出系统的三轴角速度测量值。本发明采用在线实时校准零偏的方法尽可能地降低了陀螺仪零偏的漂移,提高陀螺系统的性能。与传统标定补偿的方法相比,不受陀螺零偏重复性的限制。本发明采用各个陀螺轮流进行模态反转的方式实现了三轴角速度的测量,相比于双陀螺采用模态反转实现单轴角速度测量的技术,更为高效、经济