
基于视觉的近距离编队对偶四元数相对位姿估计算法.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于视觉的近距离编队对偶四元数相对位姿估计算法.docx
基于视觉的近距离编队对偶四元数相对位姿估计算法近年来,无人机编队控制技术以及飞行小型化技术发展迅速,进一步促进了其在各个领域的广泛应用。其中,编队飞行技术可以降低飞行成本以及提高飞行效率等优点,因此受到各个领域的高度关注。而编队飞行技术中的关键问题之一便是多个无人机之间的相对位姿估计。传统的无人机编队相对位置估计方法主要基于测距或者视觉测量等技术,但是这些方法都存在一些不可避免的局限性。例如传统测距法需要外界基站的支持,而且其精度受到环境干扰等影响;而基于视觉测量估计的方法则需要较大的计算复杂度以及测试环

基于SoftPOSIT算法的单目视觉非合作目标相对位姿估计.docx
基于SoftPOSIT算法的单目视觉非合作目标相对位姿估计随着无人机、机器人等智能机器的广泛应用,单目视觉非合作目标相对位姿估计技术逐渐成为研究的热点。非合作目标指的是没有特定标志或标记的场景中的目标。目标相对位姿估计是指在视觉系统检测到目标之后,推算出视觉相机与目标之间的空间位置关系。本文将介绍基于SoftPOSIT算法的单目视觉非合作目标相对位姿估计技术。一、技术原理单目相机测量目标相对位姿的方法主要分为三类:基于几何模型的方法、基于统计学习的方法和基于视觉SLAM的方法。其中,基于几何模型的方法是最

基于视觉的自动空中加油近距相对位姿估计.docx
基于视觉的自动空中加油近距相对位姿估计基于视觉的自动空中加油近距相对位姿估计引言:随着航空技术的发展,无人机在各个领域都得到了广泛应用。然而,由于无人机电池能量限制和任务时间限制,提高无人机的续航能力成为研究的热点之一。为了解决这个问题,空中加油技术成为了提高无人机续航能力的有效方式之一。在空中加油过程中,确保加油工作的安全性和成功性是十分重要的。为了实现自动空中加油,需要实时准确地估计无人机相对位姿。本文将基于视觉的方法,介绍自动空中加油近距相对位姿估计的研究现状和方法。研究现状:目前,关于自动空中加油

基于点线综合特征的视觉相对位姿测量误差估计方法.pdf
本发明提供了一种基于点线综合特征的视觉相对位姿测量误差估计方法,该基于点线综合特征的视觉相对位姿测量误差估计方法包括:S1、建立视觉相对位姿测量模型,包括建立基于点特征的视觉相对位姿测量模型和基于线特征的视觉相对位姿测量模型;S2、对视觉相对位姿测量模型进行误差影响参数分析,包括相机内参数的影响分析和特征提取像素误差的影响分析;S3、对视觉相对位姿测量模型进行误差仿真分析以完成视觉相对位姿测量误差估计。应用本发明的技术方案,能够解决无人机自主起降过程中视觉相对位姿测量精度易受目标特征提取精度和相机内参数标
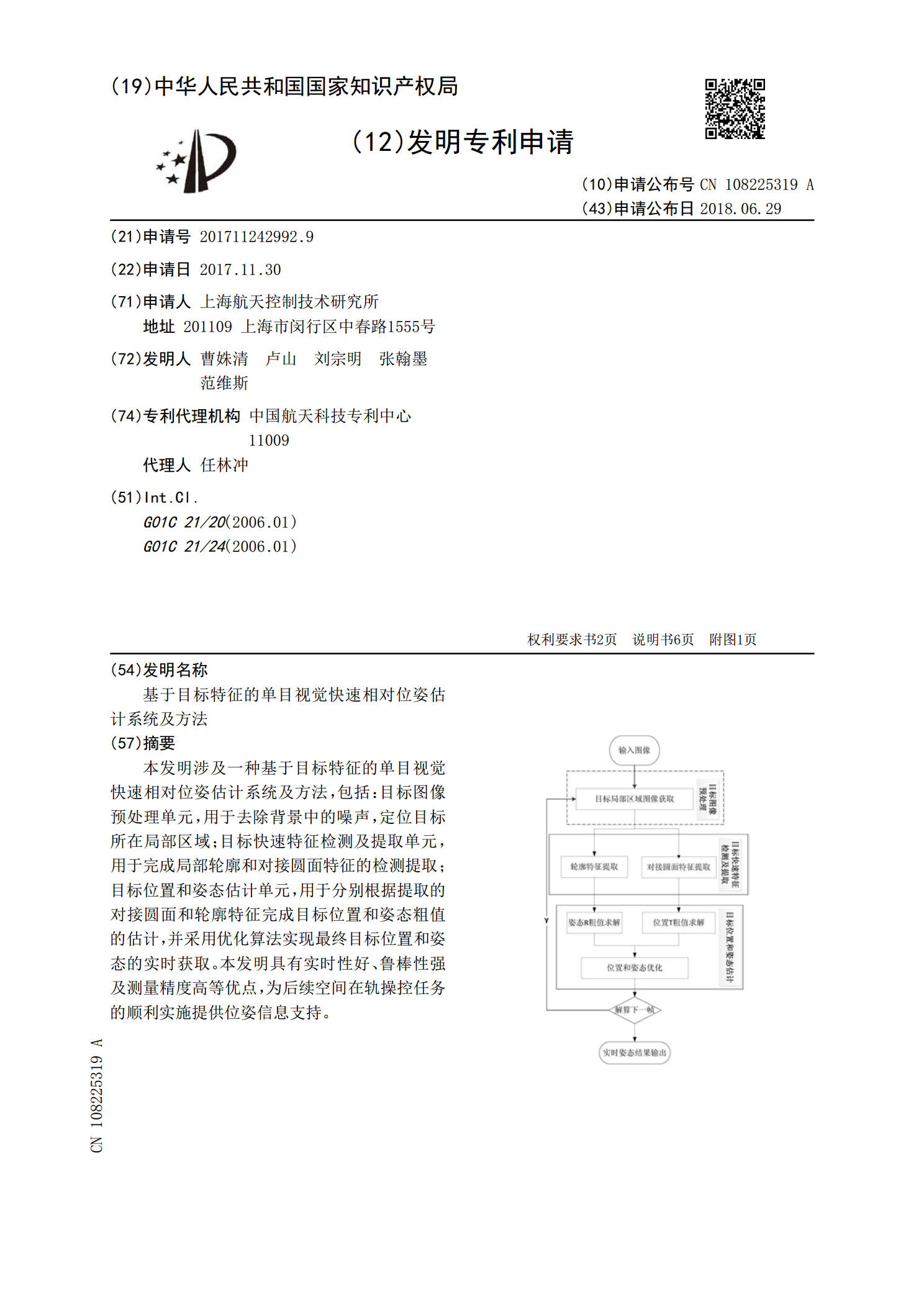
基于目标特征的单目视觉快速相对位姿估计系统及方法.pdf
本发明涉及一种基于目标特征的单目视觉快速相对位姿估计系统及方法,包括:目标图像预处理单元,用于去除背景中的噪声,定位目标所在局部区域;目标快速特征检测及提取单元,用于完成局部轮廓和对接圆面特征的检测提取;目标位置和姿态估计单元,用于分别根据提取的对接圆面和轮廓特征完成目标位置和姿态粗值的估计,并采用优化算法实现最终目标位置和姿态的实时获取。本发明具有实时性好、鲁棒性强及测量精度高等优点,为后续空间在轨操控任务的顺利实施提供位姿信息支持。