
基于SoftPOSIT算法的单目视觉非合作目标相对位姿估计.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于SoftPOSIT算法的单目视觉非合作目标相对位姿估计.docx
基于SoftPOSIT算法的单目视觉非合作目标相对位姿估计随着无人机、机器人等智能机器的广泛应用,单目视觉非合作目标相对位姿估计技术逐渐成为研究的热点。非合作目标指的是没有特定标志或标记的场景中的目标。目标相对位姿估计是指在视觉系统检测到目标之后,推算出视觉相机与目标之间的空间位置关系。本文将介绍基于SoftPOSIT算法的单目视觉非合作目标相对位姿估计技术。一、技术原理单目相机测量目标相对位姿的方法主要分为三类:基于几何模型的方法、基于统计学习的方法和基于视觉SLAM的方法。其中,基于几何模型的方法是最

基于视觉的非合作目标位姿估计方法研究.docx
基于视觉的非合作目标位姿估计方法研究基于视觉的非合作目标位姿估计方法研究摘要:随着机器视觉和机器学习的迅猛发展,基于视觉的非合作目标位姿估计方法逐渐成为研究的热点。非合作目标位姿估计是指在没有预先标定或者训练的情况下,通过对目标的视觉信息进行分析和处理,推测目标的位姿信息,从而实现对目标的跟踪和控制。本文主要研究了基于视觉的非合作目标位姿估计方法,包括特征提取,特征匹配和姿态估计三个关键步骤,并通过实验验证了该方法的可行性和有效性。关键词:视觉;非合作;目标位姿估计;特征提取;特征匹配;姿态估计1.引言非
基于目标特征的单目视觉快速相对位姿估计系统及方法.pdf
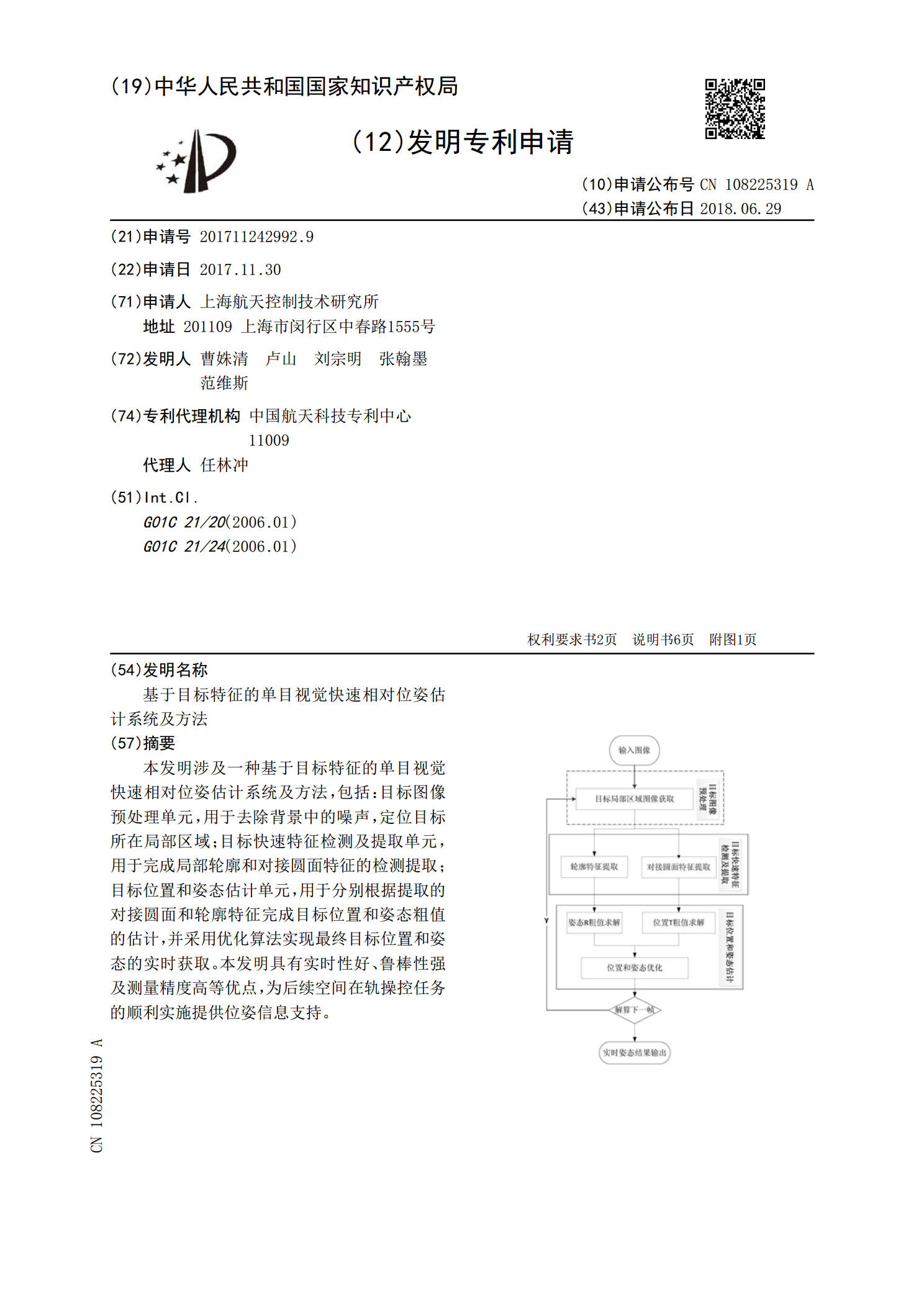
本发明涉及一种基于目标特征的单目视觉快速相对位姿估计系统及方法,包括:目标图像预处理单元,用于去除背景中的噪声,定位目标所在局部区域;目标快速特征检测及提取单元,用于完成局部轮廓和对接圆面特征的检测提取;目标位置和姿态估计单元,用于分别根据提取的对接圆面和轮廓特征完成目标位置和姿态粗值的估计,并采用优化算法实现最终目标位置和姿态的实时获取。本发明具有实时性好、鲁棒性强及测量精度高等优点,为后续空间在轨操控任务的顺利实施提供位姿信息支持。

基于视觉的非合作目标位姿估计方法研究的开题报告.docx
基于视觉的非合作目标位姿估计方法研究的开题报告一、题目及研究背景题目:基于视觉的非合作目标位姿估计方法研究研究背景:随着机器人技术的不断进步,机器人越来越广泛地应用于各行各业,特别是在制造业、物流业、医疗等领域得到了广泛应用。对于机器人技术的应用,目标位姿估计是其中一个重要的技术问题。目标位姿估计是根据传感器获取的目标图像,计算目标的位置和方向,从而为机器人提供精确的控制指令,使其能够实现精确的姿态控制。而视觉引导机器人的目标位姿估计方法具有精度高、速度快、适用性广等优点,在机器人应用中得到了广泛的研究和

基于单目深度估计的视觉里程计算法.docx
基于单目深度估计的视觉里程计算法基于单目深度估计的视觉里程计算法摘要:视觉里程计是指通过摄像头观察环境来估计运动的方法。传统的视觉里程计算法通常基于特征点匹配或特征描述符来求解相机的位姿变化。然而,这些方法在遇到低纹理、光照变化或者动态物体的情况下效果不佳。近年来,随着深度学习的兴起,基于单目深度估计的视觉里程计算法逐渐受到关注。本论文旨在介绍目前流行的基于单目深度估计的视觉里程计算法,并分析其优缺点,最后展望未来的研究方向。关键词:视觉里程计、单目深度估计、深度学习、特征点匹配、特征描述符1.引言视觉里