
基于永磁吸附的爬壁机器人本体设计与研究.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于永磁吸附的爬壁机器人本体设计与研究.docx
基于永磁吸附的爬壁机器人本体设计与研究摘要:爬壁机器人凭借其在建筑、安检等领域内的应用,成为了当今机器人领域内备受瞩目的技术,其中永磁吸附技术也逐渐成为了爬壁机器人的核心技术之一。本文以永磁吸附技术为基础,从机器人本体设计、磁力施加、控制系统等多个角度,详细介绍了爬壁机器人的系统构架,并通过实验验证了其可行性。关键词:爬壁机器人、永磁吸附、机器人本体、控制系统1.前言如今,机器人技术在建筑、安全、救援等领域内已经发挥出了举足轻重的作用。而在这些领域中,爬壁机器人则是一种非常重要的机器人类型,它能够轻松爬过

基于永磁吸附的爬壁机器人机械结构研究.docx
基于永磁吸附的爬壁机器人机械结构研究基于永磁吸附的爬壁机器人机械结构研究摘要:爬壁机器人是一种能够在垂直或倾斜表面上移动的机器人系统,对于实际应用场景中的高空作业、建筑维护和救援任务具有重要意义。本文以基于永磁吸附的爬壁机器人的机械结构为研究对象,分析了其设计原理和实现方式。通过对机械结构的设计优化和力分析、运动控制等方面的研究,提高了爬壁机器人在吸附力、稳定性和可操作性等方面的性能。研究结果表明,基于永磁吸附的爬壁机器人具有良好的机械结构设计和运动控制性能,具有较高的实用性和应用前景。关键词:爬壁机器人

基于ANSYS的爬壁机器人永磁轮吸附装置的设计与优化.docx
基于ANSYS的爬壁机器人永磁轮吸附装置的设计与优化基于ANSYS的爬壁机器人永磁轮吸附装置的设计与优化摘要:爬壁机器人是一种能够在垂直墙面上移动的机器人。为了实现其在复杂环境中的自主行动能力,设计一个高效可靠的吸附装置是至关重要的。本文基于ANSYS仿真平台,从永磁轮的材料选择和形状设计两个方面对爬壁机器人的吸附装置进行了设计与优化。关键词:爬壁机器人,吸附装置,永磁轮,ANSYS引言:近年来,爬壁机器人得到了广泛的研究和应用。它可以在垂直墙面上实现自由移动,为工业探测、消防救援等领域提供了新的解决方案
永磁吸附式轮式爬壁机器人.pdf
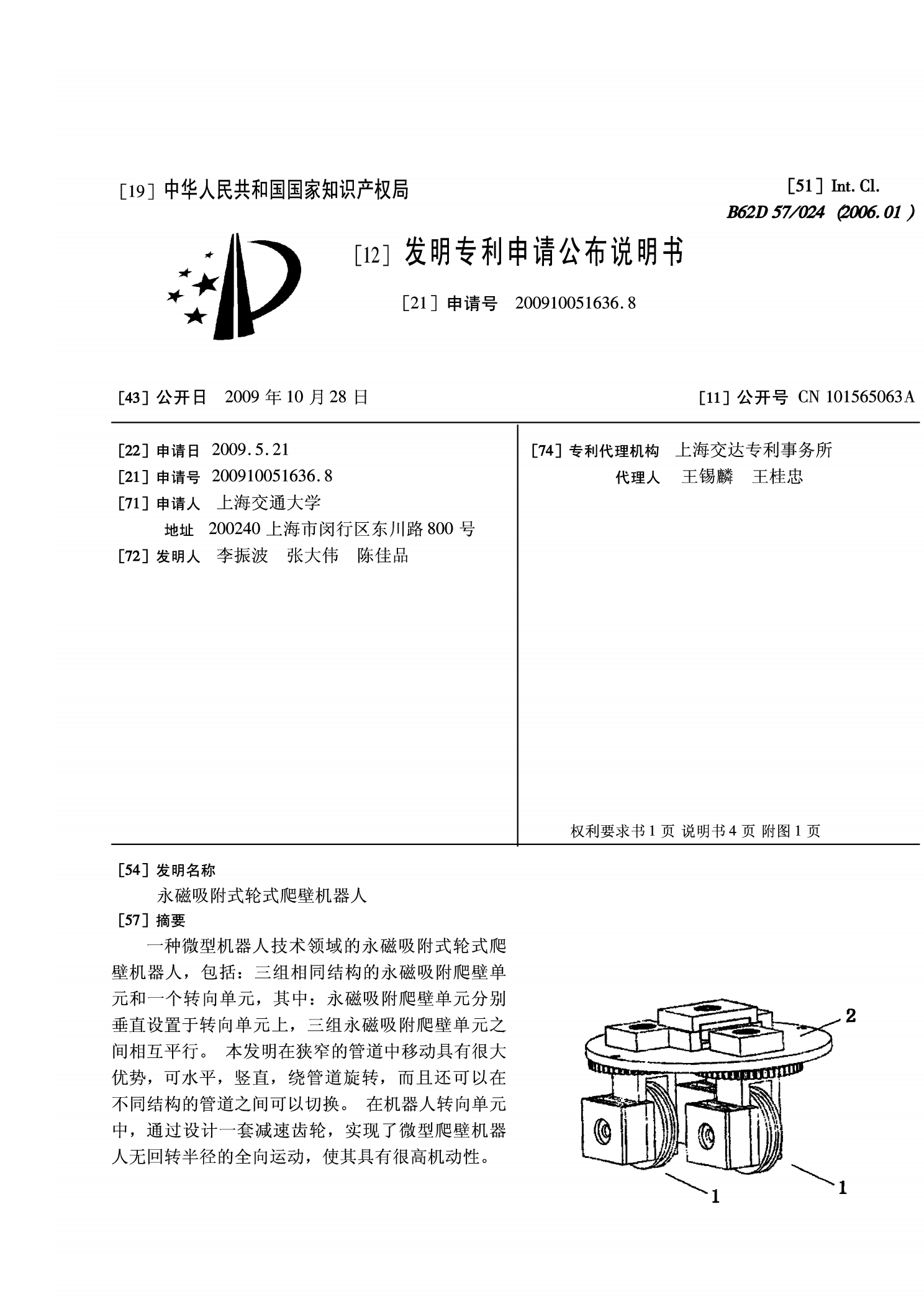
一种微型机器人技术领域的永磁吸附式轮式爬壁机器人,包括:三组相同结构的永磁吸附爬壁单元和一个转向单元,其中:永磁吸附爬壁单元分别垂直设置于转向单元上,三组永磁吸附爬壁单元之间相互平行。本发明在狭窄的管道中移动具有很大优势,可水平,竖直,绕管道旋转,而且还可以在不同结构的管道之间可以切换。在机器人转向单元中,通过设计一套减速齿轮,实现了微型爬壁机器人无回转半径的全向运动,使其具有很高机动性。

一种基于永磁吸附结构的爬壁机器人.pdf
本发明公开了一种基于永磁吸附结构的爬壁机器人,包括机器人本体结构和可抗磁场干扰的控制系统;机器人本体结构包括底盘、可吸附的行走结构、设备负载;可吸附式行走机构包括主动永磁轮、万向辅助永磁轮、直流伺服电机、涡轮蜗杆减速机和齿形带传动机构;永磁轮机构主要包括铝合金带轮、永磁体、轭铁等;控制系统主要包括工业母版、PLC控制器、CCD工业相机等。本发明在智能控制条件下能实现在化工容器、大型船舶船体等钢制壁面上稳定性走和有效检测,具有结构紧凑、重量轻、控制简单等优点。