
基于条件卷积与极化自注意力的单目深度与位姿估计.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于条件卷积与极化自注意力的单目深度与位姿估计.docx
基于条件卷积与极化自注意力的单目深度与位姿估计基于条件卷积与极化自注意力的单目深度与位姿估计摘要:单目深度与位姿估计在计算机视觉领域中具有重要意义。传统的方法往往依赖于大量标注的真实数据,而且在复杂环境中的表现较差。本文提出了一种基于条件卷积与极化自注意力的方法,该方法能够同时估计图像中物体的深度与位姿,能够在复杂场景下取得更好的性能。1.引言单目深度与位姿估计是计算机视觉领域中的一个重要问题,它在许多应用领域中都具有重要意义,例如增强现实、机器人导航等。传统的方法通常依赖于大量标注的真实数据,但是在复杂

基于注意力机制的自监督单目图像深度估计.pptx
基于注意力机制的自监督单目图像深度估计目录添加章节标题注意力机制注意力机制的原理注意力机制在深度估计中的应用注意力机制的优势注意力机制的实现方式自监督学习自监督学习的原理单目图像深度估计的挑战自监督学习在深度估计中的重要性自监督学习的实现方式单目图像深度估计单目图像深度估计的原理深度估计的常用方法深度估计的评估指标深度估计的应用场景基于注意力机制的自监督单目图像深度估计方法方法概述模型架构与实现细节实验结果与分析与其他方法的比较未来展望当前研究的局限性与挑战未来研究方向与展望THANKYOU

基于注意力机制的自监督单目深度估计方法研究.docx
基于注意力机制的自监督单目深度估计方法研究基于注意力机制的自监督单目深度估计方法研究摘要:自监督深度估计是一种近年来备受关注的研究领域,其可以通过使用无需深度标注的图像数据来预测场景中的深度信息。本文研究了基于注意力机制的自监督单目深度估计方法。该方法通过学习图像中不同区域之间的关联性,来进一步提高深度估计的准确性。在实验中,我们使用了大量的自监督训练数据,并且通过对比实验验证了该方法的有效性。关键词:自监督深度估计,单目深度估计,注意力机制1.引言深度估计是计算机视觉中的重要任务之一,它可以为许多场景理
基于自注意力导向特征融合的自监督单目深度估计方法.pdf
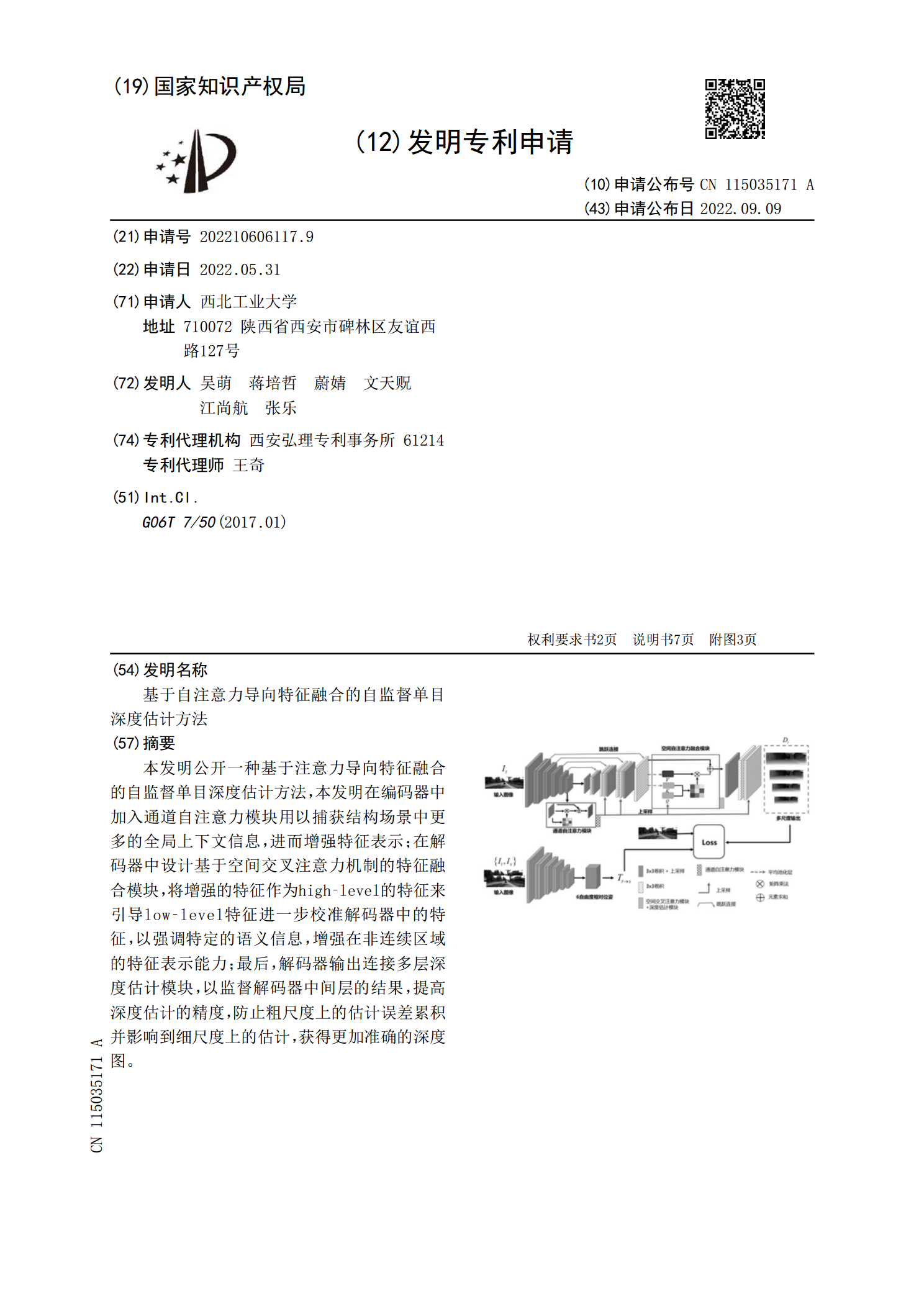
本发明公开一种基于注意力导向特征融合的自监督单目深度估计方法,本发明在编码器中加入通道自注意力模块用以捕获结构场景中更多的全局上下文信息,进而增强特征表示;在解码器中设计基于空间交叉注意力机制的特征融合模块,将增强的特征作为high‑level的特征来引导low‑level特征进一步校准解码器中的特征,以强调特定的语义信息,增强在非连续区域的特征表示能力;最后,解码器输出连接多层深度估计模块,以监督解码器中间层的结果,提高深度估计的精度,防止粗尺度上的估计误差累积并影响到细尺度上的估计,获得更加准确的深度

基于密集卷积网络的单目图像深度估计方法.pptx
基于密集卷积网络的单目图像深度估计方法01添加章节标题密集卷积网络的基本原理卷积神经网络的基本结构密集卷积网络的特点和优势密集卷积网络在单目图像深度估计中的应用单目图像深度估计方法基于相机的单目深度估计方法基于视差的单目深度估计方法基于光流的单目深度估计方法基于深度学习的单目深度估计方法基于密集卷积网络的单目图像深度估计方法密集卷积网络在深度估计中的实现方式密集卷积网络在深度估计中的优化策略密集卷积网络在深度估计中的性能评估密集卷积网络在深度估计中的未来发展方向实验结果与分析实验数据集和实验环境介绍实验方