
基于自注意力导向特征融合的自监督单目深度估计方法.pdf

一只****懿呀


1/10
2/10

3/10
4/10

5/10
6/10

7/10

8/10
9/10

10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于自注意力导向特征融合的自监督单目深度估计方法.pdf
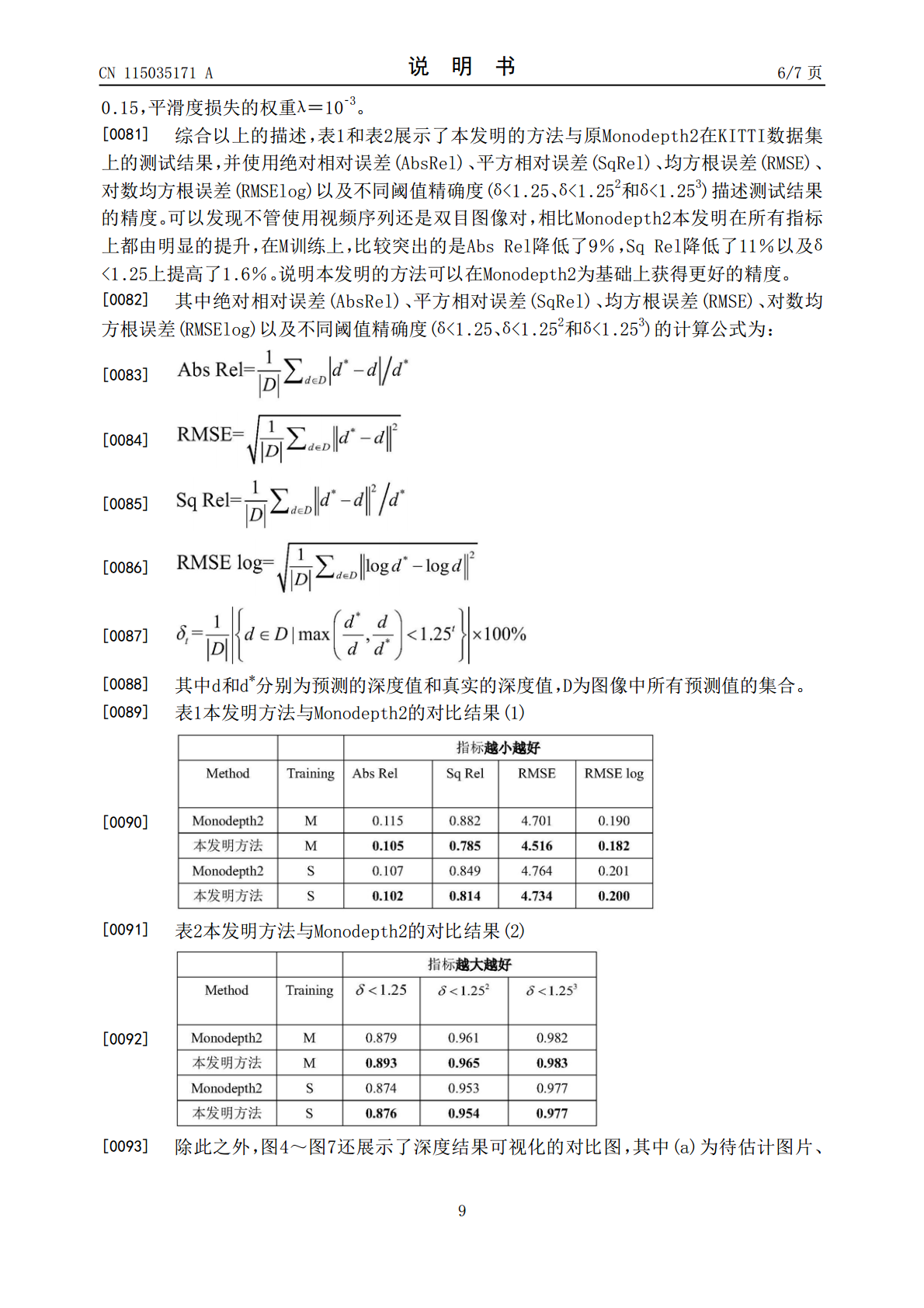
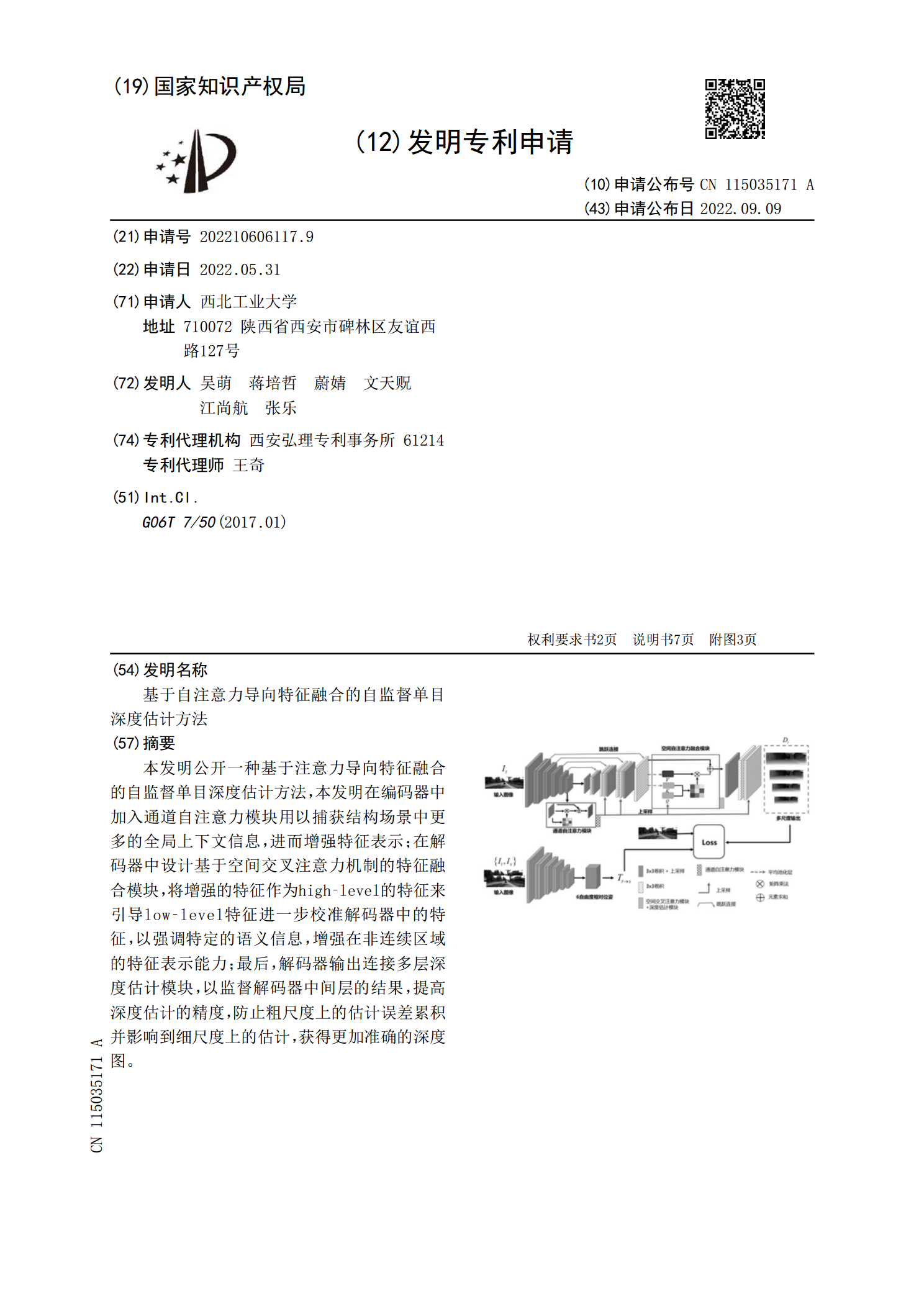
本发明公开一种基于注意力导向特征融合的自监督单目深度估计方法,本发明在编码器中加入通道自注意力模块用以捕获结构场景中更多的全局上下文信息,进而增强特征表示;在解码器中设计基于空间交叉注意力机制的特征融合模块,将增强的特征作为high‑level的特征来引导low‑level特征进一步校准解码器中的特征,以强调特定的语义信息,增强在非连续区域的特征表示能力;最后,解码器输出连接多层深度估计模块,以监督解码器中间层的结果,提高深度估计的精度,防止粗尺度上的估计误差累积并影响到细尺度上的估计,获得更加准确的深度

基于注意力机制的自监督单目深度估计方法研究.docx
基于注意力机制的自监督单目深度估计方法研究基于注意力机制的自监督单目深度估计方法研究摘要:自监督深度估计是一种近年来备受关注的研究领域,其可以通过使用无需深度标注的图像数据来预测场景中的深度信息。本文研究了基于注意力机制的自监督单目深度估计方法。该方法通过学习图像中不同区域之间的关联性,来进一步提高深度估计的准确性。在实验中,我们使用了大量的自监督训练数据,并且通过对比实验验证了该方法的有效性。关键词:自监督深度估计,单目深度估计,注意力机制1.引言深度估计是计算机视觉中的重要任务之一,它可以为许多场景理

基于注意力机制的自监督单目图像深度估计.pptx
基于注意力机制的自监督单目图像深度估计目录添加章节标题注意力机制注意力机制的原理注意力机制在深度估计中的应用注意力机制的优势注意力机制的实现方式自监督学习自监督学习的原理单目图像深度估计的挑战自监督学习在深度估计中的重要性自监督学习的实现方式单目图像深度估计单目图像深度估计的原理深度估计的常用方法深度估计的评估指标深度估计的应用场景基于注意力机制的自监督单目图像深度估计方法方法概述模型架构与实现细节实验结果与分析与其他方法的比较未来展望当前研究的局限性与挑战未来研究方向与展望THANKYOU
基于密集特征融合的无监督单目深度估计.pptx
,目录PartOnePartTwo特征提取特征融合策略特征融合的优势特征融合的挑战PartThree无监督学习的定义和重要性单目深度估计的挑战基于密集特征融合的无监督单目深度估计方法方法的有效性和局限性PartFour数据集和实验设置性能评估指标实验结果和分析结果比较和讨论PartFive结论总结未来工作方向THANKS
一种基于全局注意力的自监督单目深度估计算法.pdf
本发明提出基于全局注意力的自监督单目深度估计算法,解决卷积只能计算局部像素相关性的问题,提高了网络对于边界处和遮挡处的深度预测精度,其包括以下步骤:1)构建由卷积层和池化层所组成的编码器来提取不同分辨率图像特征,充分利用不同尺度的特征信息;2)构建由卷积层、上采样层组成的解码器来利用接收到的编码器层特征,从而生成精密的深度图;3)通过将编码器的不同分辨率信息通过基于全局空间注意力模块,从而构建编解码器之间的联系,以减少语义差距;4)通过逐像素平滑度损失和图像重投影损失结合来优化模型。