
基于激光摄影测量方法的地铁限界检测系统研究.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于激光摄影测量方法的地铁限界检测系统研究.docx
基于激光摄影测量方法的地铁限界检测系统研究随着地铁的快速发展以及城市化进程的加速推进,地铁工程的建设和运营已成为现代城市公共交通网络中不可或缺的一部分。然而,在地铁建设和运营的过程中,地铁限界问题一直是一个不容忽视的难题。地铁限界是指地铁车辆在行驶过程中所允许的最大高度、最大宽度和最小曲率半径等一系列空间限制。在地铁的设计和建设过程中,必须要考虑到这些限制,否则地铁车辆就会出现行进受阻甚至发生事故的风险,对地铁运营安全和效率产生极大的影响。因此,开发一种高精度、智能化、实时监测地铁限界的系统对于提高地铁运
一种基于激光扫描的地铁隧道限界动态检测方法.pdf
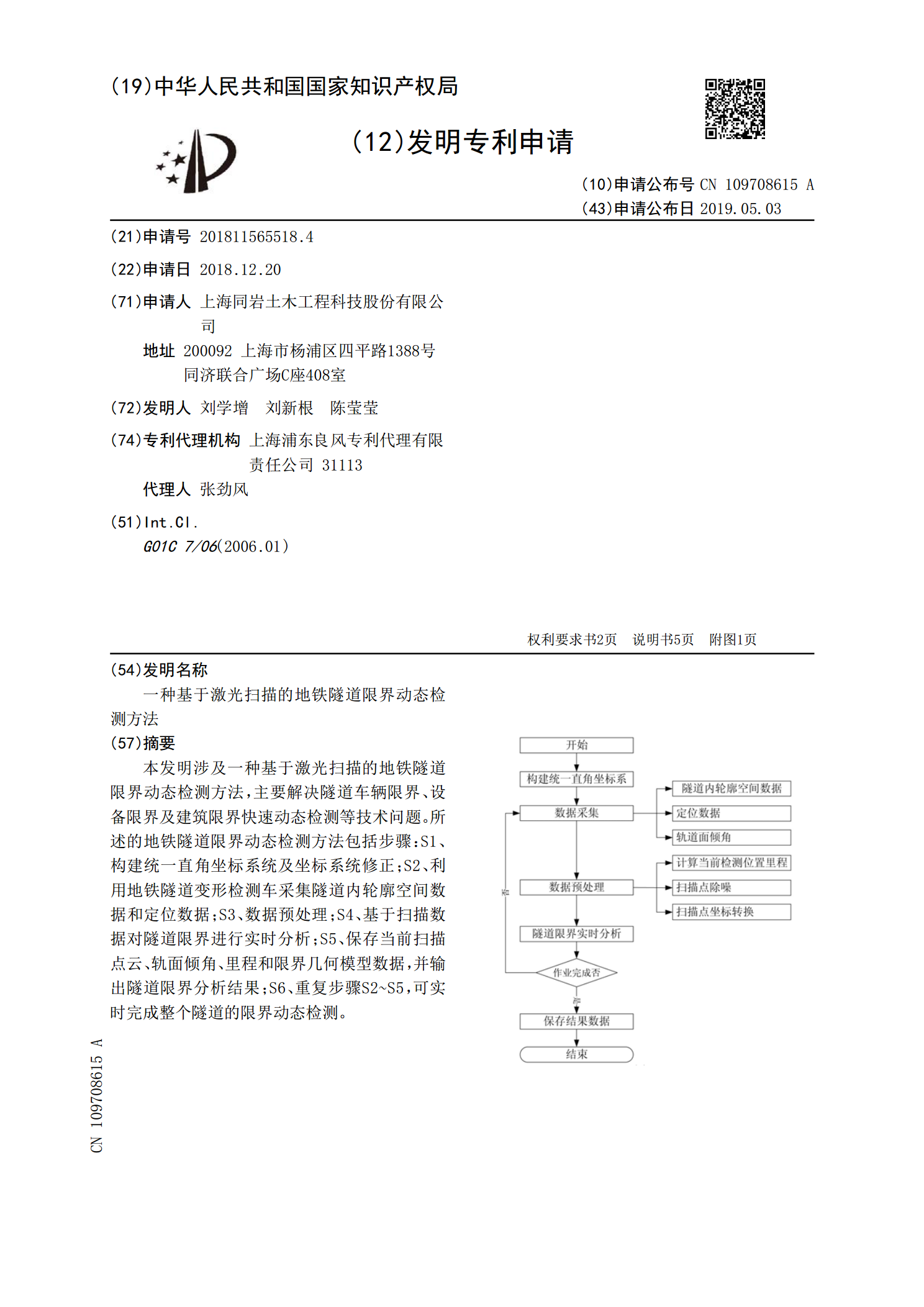
本发明涉及一种基于激光扫描的地铁隧道限界动态检测方法,主要解决隧道车辆限界、设备限界及建筑限界快速动态检测等技术问题。所述的地铁隧道限界动态检测方法包括步骤:S1、构建统一直角坐标系统及坐标系统修正;S2、利用地铁隧道变形检测车采集隧道内轮廓空间数据和定位数据;S3、数据预处理;S4、基于扫描数据对隧道限界进行实时分析;S5、保存当前扫描点云、轨面倾角、里程和限界几何模型数据,并输出隧道限界分析结果;S6、重复步骤S2~S5,可实时完成整个隧道的限界动态检测。

地铁限界检测系统研究的任务书.docx
地铁限界检测系统研究的任务书任务书一、研究的背景和意义随着城市地铁的不断建设,地铁安全问题日益引起人们的关注。地铁限界检测作为地铁安全的重要组成部分,一直是地铁建设和使用中不可缺少的环节。目前,国内地铁限界检测系统存在一些问题,如检测精度不高、耗时较长、设备成本较高等,需要进行研究和改进。因此,本研究旨在针对上述问题,开展地铁限界检测系统的研究,提高检测精度和效率,降低设备成本,为地铁安全运营提供更好的保障。二、研究内容和目标1.地铁限界检测系统的现状分析,包括国内外地铁限界检测的技术发展现状、设备应用情
基于激光雷达的高铁车厢静态限界测量方法.pdf
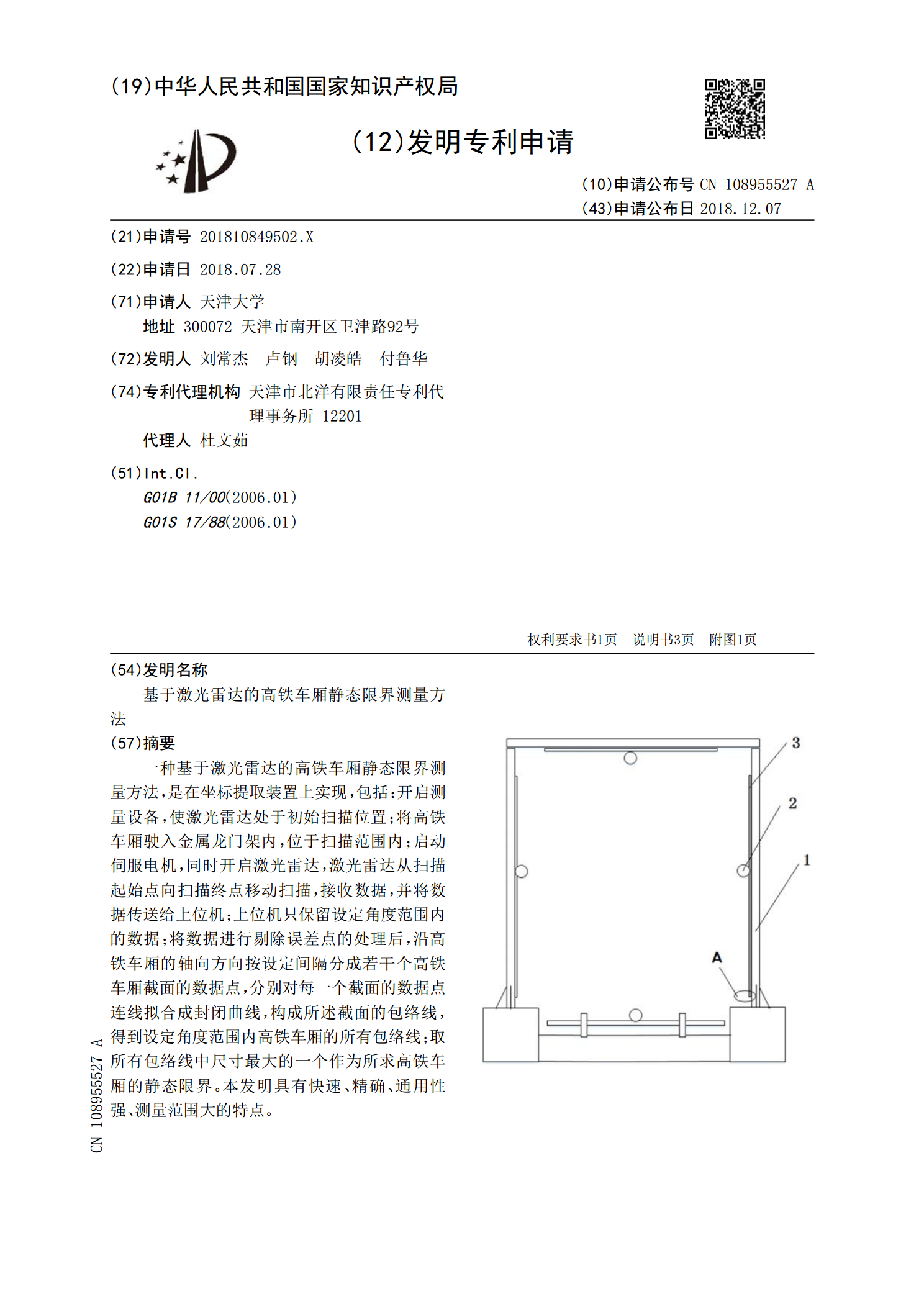
一种基于激光雷达的高铁车厢静态限界测量方法,是在坐标提取装置上实现,包括:开启测量设备,使激光雷达处于初始扫描位置;将高铁车厢驶入金属龙门架内,位于扫描范围内;启动伺服电机,同时开启激光雷达,激光雷达从扫描起始点向扫描终点移动扫描,接收数据,并将数据传送给上位机;上位机只保留设定角度范围内的数据;将数据进行剔除误差点的处理后,沿高铁车厢的轴向方向按设定间隔分成若干个高铁车厢截面的数据点,分别对每一个截面的数据点连线拟合成封闭曲线,构成所述截面的包络线,得到设定角度范围内高铁车厢的所有包络线;取所有包络线中

基于激光扫描的隧道限界侵限检测研究.docx
基于激光扫描的隧道限界侵限检测研究隧道的限界侵限检测是现代交通领域的一个重要的问题,与交通安全息息相关。传统的隧道限界侵限检测方法主要是靠人工测量或者机械测量,测量结果精度依赖于人员操作和测量仪器的精度,存在着不稳定性和不可再现性等问题,影响了检测结果的准确性和对隧道的安全管理。因此,基于激光扫描技术的隧道限界侵限检测方法应运而生。一、激光扫描技术的基本原理激光扫描技术是一种无接触式的三维数据采集方式。它以激光束为载体,经过特殊的发射器(激光扫描仪)发射出高能量的激光束,对被测物体进行扫描,并通过光电传感