
基于彩色图像的高速目标单目位姿测量方法.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于彩色图像的高速目标单目位姿测量方法.docx
基于彩色图像的高速目标单目位姿测量方法摘要:本文提出了一种基于彩色图像的高速目标单目位姿测量方法。该方法采用一个基于特征匹配的单目姿态估计算法来计算目标的位姿,应用于机器人操作和自主导航等实际场景中。本文着重介绍了算法的基本原理、实现方法及其在实际应用中的效果。实验结果表明,该方法具有较高的精度和速度,能够满足实际场景中的高速度、高精度测量需求。关键词:彩色图像、单目位姿测量、特征匹配、机器人操作、自主导航。1.背景在机器人操作、自主导航、增强现实等应用中,对目标的位姿追踪往往是非常重要的。目标的位姿信息

基于单目位姿估计的拉力扭转形变测量方法研究.docx
基于单目位姿估计的拉力扭转形变测量方法研究基于单目位姿估计的拉力扭转形变测量方法研究引言:在工程领域中,拉力扭转形变的测量对于确保结构的稳定性和工程安全性具有重要意义。传统的拉力扭转形变测量方法通常依赖于使用传感器和测量仪器,但这种方法并不一定适用于所有情况,特别是在对于复杂结构或不便于使用传感器的环境下。因此,本文研究了基于单目位姿估计的拉力扭转形变测量方法,以提供一种更灵活和便捷的测量解决方案。1.文献综述:近年来,机器视觉和计算机图像处理的发展为基于单目位姿估计的测量方法提供了坚实的基础。许多研究者
一种基于圆形标志点的单目位姿测量方法.pdf
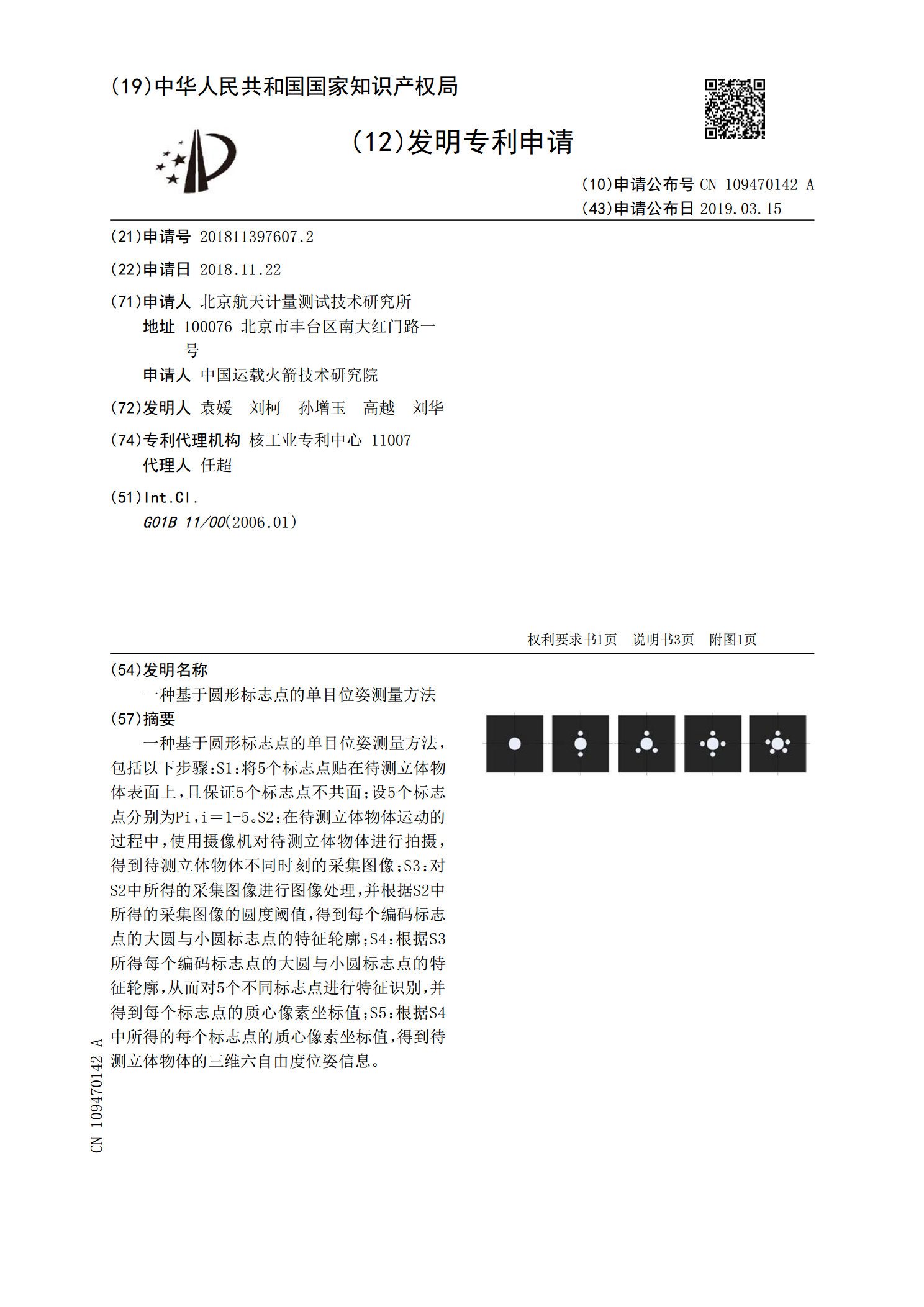
一种基于圆形标志点的单目位姿测量方法,包括以下步骤:S1:将5个标志点贴在待测立体物体表面上,且保证5个标志点不共面;设5个标志点分别为Pi,i=1‑5。S2:在待测立体物体运动的过程中,使用摄像机对待测立体物体进行拍摄,得到待测立体物体不同时刻的采集图像;S3:对S2中所得的采集图像进行图像处理,并根据S2中所得的采集图像的圆度阈值,得到每个编码标志点的大圆与小圆标志点的特征轮廓;S4:根据S3所得每个编码标志点的大圆与小圆标志点的特征轮廓,从而对5个不同标志点进行特征识别,并得到每个标志点的质心像素坐
基于三维特征约束的单目深度图像位姿优化方法.pdf
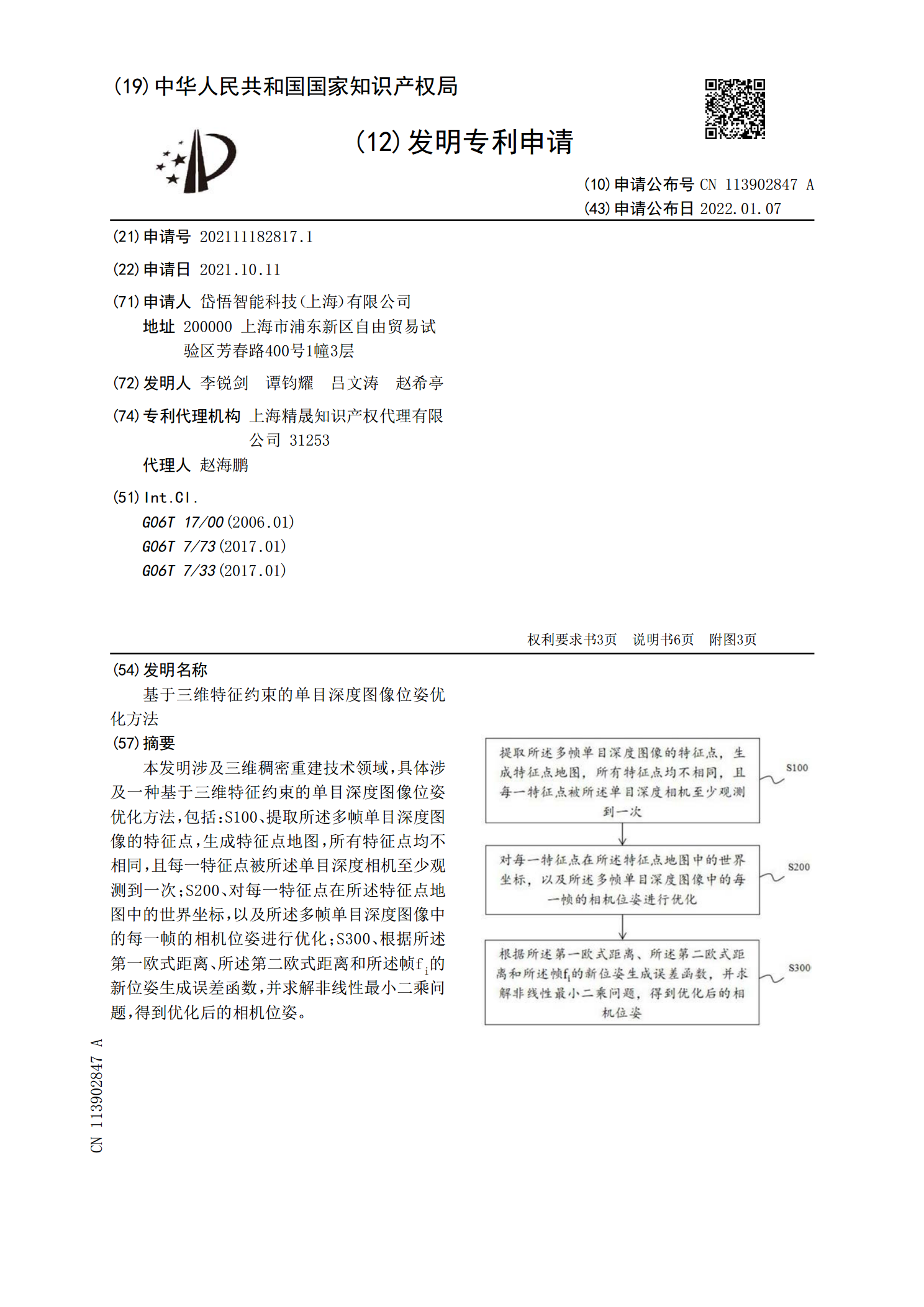
本发明涉及三维稠密重建技术领域,具体涉及一种基于三维特征约束的单目深度图像位姿优化方法,包括:S100、提取所述多帧单目深度图像的特征点,生成特征点地图,所有特征点均不相同,且每一特征点被所述单目深度相机至少观测到一次;S200、对每一特征点在所述特征点地图中的世界坐标,以及所述多帧单目深度图像中的每一帧的相机位姿进行优化;S300、根据所述第一欧式距离、所述第二欧式距离和所述帧f

基于轮廓部件模型的低对比物体鲁棒单目位姿跟踪.docx
基于轮廓部件模型的低对比物体鲁棒单目位姿跟踪摘要:近年来,针对低对比度物体单目位姿跟踪问题,提出了多种解决方案。本文提出一种基于轮廓部件模型的低对比物体鲁棒单目位姿跟踪算法。该算法通过将物体轮廓分成多个部件,并针对每个部件构建其对应的轮廓模型,从而实现对物体旋转和平移位姿的跟踪。本文在公开数据集上进行实验验证,结果表明,该算法在低对比度环境下具有较高的鲁棒性和准确性,为单目位姿跟踪领域提供了一种新的解决方案。关键词:单目位姿跟踪;低对比度物体;轮廓部件模型。一、绪论随着计算机视觉技术的不断发展,单目视觉位