
基于应变片阵列的机器人变刚度关节力矩传感器研究.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于应变片阵列的机器人变刚度关节力矩传感器研究.docx
基于应变片阵列的机器人变刚度关节力矩传感器研究近年来,随着机器人在工业、医疗和服务领域的广泛应用,对机器人的运动控制和力矩控制精度要求越来越高。因此,研究开发一种精度高、功能强大的机器人变刚度关节力矩传感器对于机器人控制和应用有着极为重要的意义。本文以基于应变片阵列技术的变刚度关节力矩传感器为研究对象,探究其研究现状、原理、结构、性能及应用等问题。一、研究现状变刚度关节力矩传感器是机器人控制领域中重要的传感器之一。目前,国内外学者对该领域的研究已经取得了一系列成果。国外主要研究机构包括麻省理工学院、南加州

协作机器人关节力矩传感器的设计与研究.docx
协作机器人关节力矩传感器的设计与研究随着工业自动化技术不断发展,协作机器人逐渐进入人们的视野。协作机器人能够与人类共同完成工作,缩短了生产周期,提高了生产效率。而协作机器人的关节力矩传感器是其中一个非常重要的组成部分,它能够对协作机器人的关节施力情况进行监测和控制,保证机器人在工作过程中的稳定性和安全性。本文将介绍协作机器人关节力矩传感器的设计原理和研究进展。一、协作机器人关节力矩传感器的设计原理协作机器人关节力矩传感器是一种测量机械臂关节受力情况的装置。传感器根据机械臂关节处力矩的不同变化,利用传感器的

变刚度柔顺机器人关节设计及人机关节刚度匹配方法研究.docx
变刚度柔顺机器人关节设计及人机关节刚度匹配方法研究论文题目:变刚度柔顺机器人关节设计及人机关节刚度匹配方法研究摘要:随着机器人技术的发展,柔顺机器人的应用领域逐渐扩大,其关节的设计与人机关节刚度匹配成为研究的重点。本文针对此问题展开深入研究,主要包括变刚度柔顺机器人关节的设计和人机关节刚度匹配方法的研究。首先,通过分析柔顺机器人的应用和关节设计的要求,提出了一种变刚度柔顺机器人关节设计方案,并介绍了其基本结构和工作原理。其次,针对关节刚度匹配的问题,通过建立关节刚度模型,提出了一种基于优化算法的人机关节刚
基于SMA弹簧驱动叶片弹簧的机器人变刚度关节.pdf
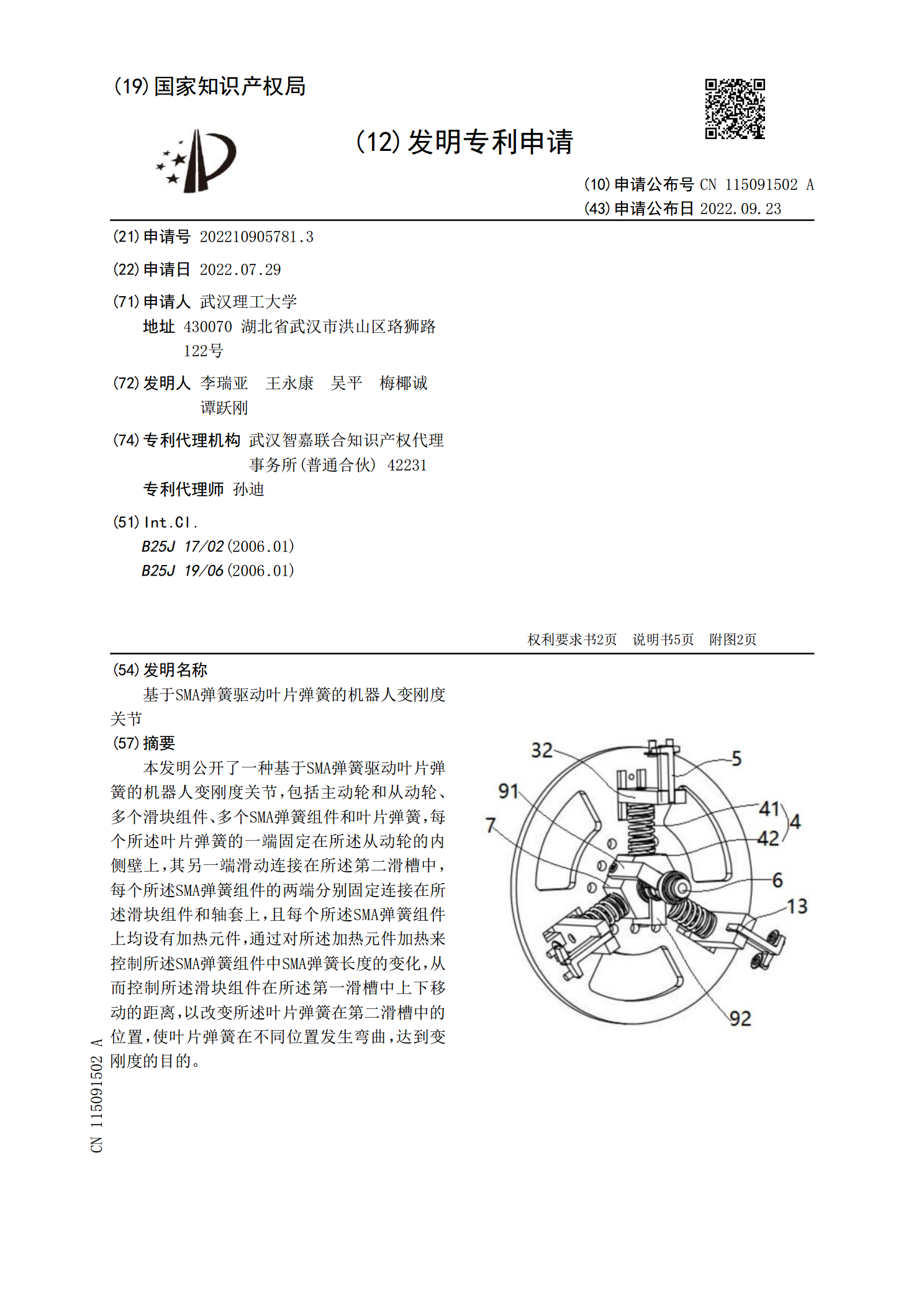
本发明公开了一种基于SMA弹簧驱动叶片弹簧的机器人变刚度关节,包括主动轮和从动轮、多个滑块组件、多个SMA弹簧组件和叶片弹簧,每个所述叶片弹簧的一端固定在所述从动轮的内侧壁上,其另一端滑动连接在所述第二滑槽中,每个所述SMA弹簧组件的两端分别固定连接在所述滑块组件和轴套上,且每个所述SMA弹簧组件上均设有加热元件,通过对所述加热元件加热来控制所述SMA弹簧组件中SMA弹簧长度的变化,从而控制所述滑块组件在所述第一滑槽中上下移动的距离,以改变所述叶片弹簧在第二滑槽中的位置,使叶片弹簧在不同位置发生弯曲,达到

模块化机器人关节力矩传感器的研究.docx
模块化机器人关节力矩传感器的研究摘要本文介绍了模块化机器人关节力矩传感器的研究。机器人的关节力矩传感器可以测量机器人在关节处的力矩,是机器人控制系统的重要组成部分。本文介绍了机器人关节力矩传感器的原理、设计、制造等方面的研究进展。针对传统机器人传感器的缺点,本文提出了一种模块化机器人关节力矩传感器的设计方案,并对其进行了实验验证。实验结果表明,该传感器具有较好的稳定性和精度,可应用于机器人控制系统中。关键词:机器人;关节力矩传感器;模块化设计;实验验证1.引言机器人是一种智能化的操作系统,其特点是能够自主