
基于IMM的大尺寸回转零件动态位置检测方法.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于IMM的大尺寸回转零件动态位置检测方法.docx
基于IMM的大尺寸回转零件动态位置检测方法摘要:本文提出了一种基于IMM(InteractingMultipleModel)的大尺寸回转零件动态位置检测方法。该方法采用多模型融合策略,并结合粒子滤波算法,能够有效、准确地检测目标的位置和姿态,并提高估计精度。在实验中,该方法被应用于检测车辆轮胎的位置及姿态信息,结果表明本文提出的方法具有良好的检测效果和鲁棒性。关键词:大尺寸回转零件;动态位置检测;IMM;粒子滤波;多模型融合1.引言大尺寸回转零件具有重要的工业应用价值。然而,由于其在运动过程中受到外界干扰

基于机器视觉的回转体类零件外尺寸无损检测研究的开题报告.docx
基于机器视觉的回转体类零件外尺寸无损检测研究的开题报告一、选题背景机械零件的质量是保证机械产品正常运转的关键因素之一,因此对于机械零件的检测也日益受到重视。传统的机械零件检测方法多为人工检测,但这种方法效率低下、耗时长、精度低,且结果易受人为因素影响。因此,应用机器视觉技术进行机械零件的检测,具有可靠性高、精度高、效率高的优点,受到了广泛关注。其中,回转体类零件具有形状规则、表面光滑的特性,适合采用机器视觉技术进行检测。针对回转体类零件外尺寸的无损检测,一直是研究热点。现有的方法主要有CMM(Coordi

基于图像处理的锅炉零件尺寸检测方法.pdf
本发明涉及尺寸检测技术领域,具体涉及基于图像处理的锅炉零件尺寸检测方法。该方法包括:设置滑动窗口遍历采集到的锅炉炉排的俯视图像,对首个窗口去噪,在窗口滑动过程中,以目标窗口的上一行的中点像素点作为参考值,构建目标窗口的参考指标,利用每个目标窗口的参考指标进行逐窗口的滤波操作,获取俯视图像的去噪图像;对去噪图像进行边缘提取,筛选出边缘中的连续点,获取待连接边缘段,利用圆的数学性质将相邻的待连接边缘段连接,获取边缘信息;对边缘信息进行霍夫圆检测,得到最优检测圆;获取最优检测圆的特征指标,根据特征指标构建标准度

基于模式识别的大尺寸弯曲零件轮廓度质量检测方法.pdf
本发明公开了一种基于模式识别的大尺寸弯曲零件轮廓度质量检测方法,通过工业相机获取零件或产品的正投影试图;利用模式识别技术提取合格和不合格零件的弯曲特征作为训练样本;然后利用支持向量机进行样本训练,形成支持向量机分类器;然后输入待检测的零件弯曲特征进行质量判断;判断合格,进入下一道工序;判断不合格,需要进行校正处理,继续提取弯曲特征进入支持向量机分类器进行质量状态判断。本发明将模式识别与支持向量机用于零件弯曲质量检验,使得零件弯曲质量检验准确率高且效率高,无接触。
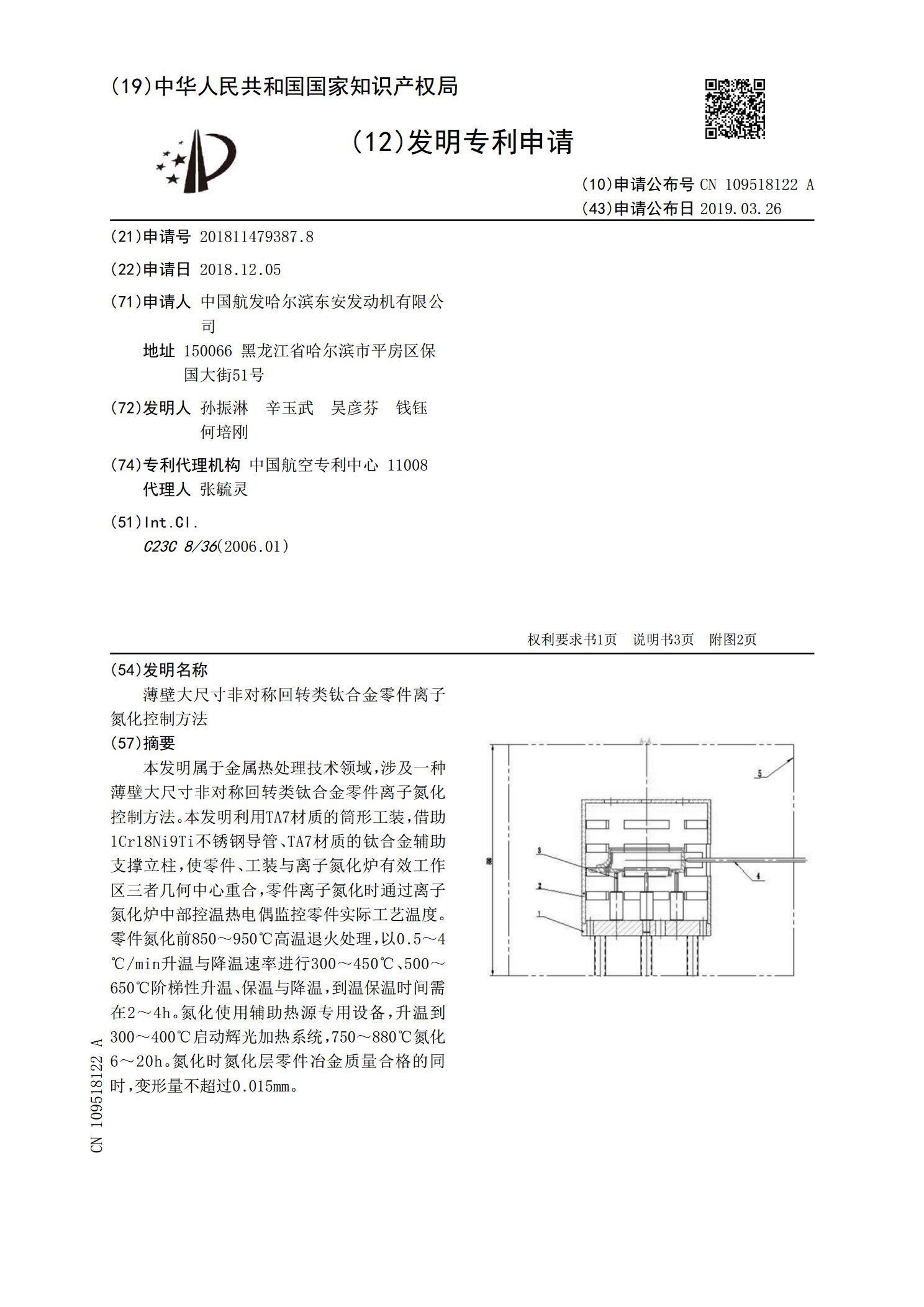
薄壁大尺寸非对称回转类钛合金零件离子氮化控制方法.pdf
本发明属于金属热处理技术领域,涉及一种薄壁大尺寸非对称回转类钛合金零件离子氮化控制方法。本发明利用TA7材质的筒形工装,借助1Cr18Ni9Ti不锈钢导管、TA7材质的钛合金辅助支撑立柱,使零件、工装与离子氮化炉有效工作区三者几何中心重合,零件离子氮化时通过离子氮化炉中部控温热电偶监控零件实际工艺温度。零件氮化前850~950℃高温退火处理,以0.5~4℃/min升温与降温速率进行300~450℃、500~650℃阶梯性升温、保温与降温,到温保温时间需在2~4h。氮化使用辅助热源专用设备,升温到300~4