
基于Hu矩的无人直升机着舰标志识别方法.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于Hu矩的无人直升机着舰标志识别方法.docx
基于Hu矩的无人直升机着舰标志识别方法摘要:随着无人机技术的不断发展,无人直升机着舰标志识别具有重要的意义。本文基于Hu矩理论,在对直升机着舰标志进行特征提取的基础上,提出了一种无人直升机着舰标志识别方法,通过实验验证,证明本文提出的方法具有较高的识别准确度和鲁棒性。一、引言无人机技术的应用越来越广泛,其中无人直升机具有独特的优势,在海洋巡逻、特种作战等领域具有重要的作用。然而,无人直升机的自主着舰技术仍存在一定的难题,其中着舰标志的快速准确识别是关键技术之一。因此,对无人直升机着舰标志的识别方法研究具有
基于改进Hu不变矩和ELM的交通标志牌识别方法和装置.pdf
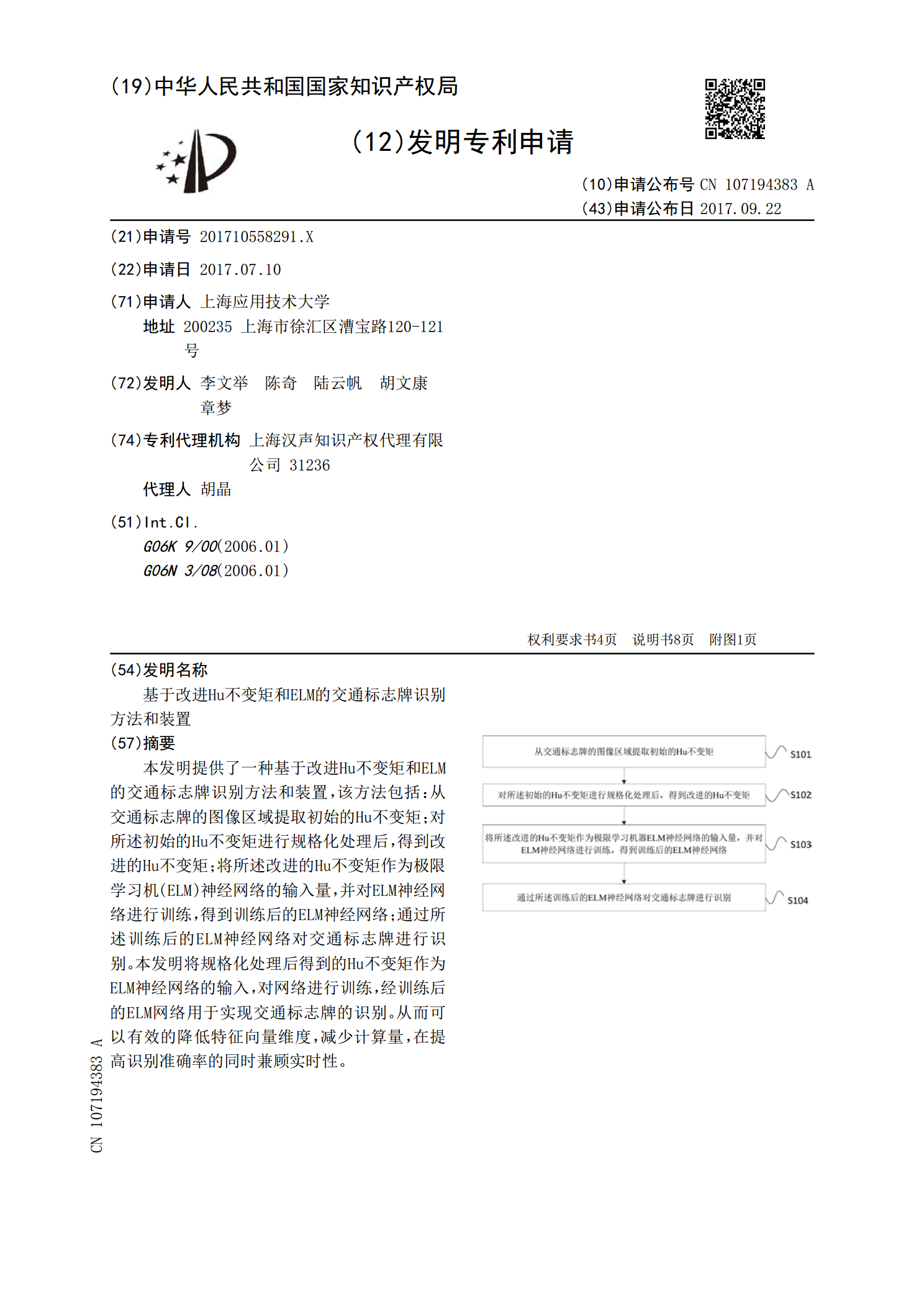
本发明提供了一种基于改进Hu不变矩和ELM的交通标志牌识别方法和装置,该方法包括:从交通标志牌的图像区域提取初始的Hu不变矩;对所述初始的Hu不变矩进行规格化处理后,得到改进的Hu不变矩;将所述改进的Hu不变矩作为极限学习机(ELM)神经网络的输入量,并对ELM神经网络进行训练,得到训练后的ELM神经网络;通过所述训练后的ELM神经网络对交通标志牌进行识别。本发明将规格化处理后得到的Hu不变矩作为ELM神经网络的输入,对网络进行训练,经训练后的ELM网络用于实现交通标志牌的识别。从而可以有效的降低特征向量

基于滑模变结构的无人直升机着舰控制研究.docx
基于滑模变结构的无人直升机着舰控制研究基于滑模变结构的无人直升机着舰控制研究摘要:无人直升机的着舰控制是无人飞行器技术中的重要研究领域之一。本论文以滑模变结构控制为基础,研究了无人直升机的着舰控制策略。通过建立无人直升机着舰动力学模型,设计了基于滑模变结构的控制器,并对控制器进行仿真和实验验证。研究结果表明,该方法具有较好的控制性能,能够实现无人直升机的稳定着舰。关键词:滑模变结构;无人直升机;着舰控制;控制器设计1引言无人直升机作为一种重要的无人飞行器,具有广泛的应用前景。然而,由于其特殊的飞行特性,无

基于颜色聚类和Hu不变矩的道路交通标志检测.docx
基于颜色聚类和Hu不变矩的道路交通标志检测基于颜色聚类和Hu不变矩的道路交通标志检测摘要:随着交通工具的普及和道路交通的增加,道路交通标志的检测和识别对于保障交通安全至关重要。本文提出了一种基于颜色聚类和Hu不变矩的道路交通标志检测方法。首先,通过颜色聚类将图像中的道路交通标志从背景中分割出来,并通过形态学处理和边缘检测进一步提取其轮廓信息。然后,使用Hu不变矩对提取的轮廓进行描述和特征提取,以实现道路交通标志的检测和识别。实验结果表明,该方法具有较高的准确性和鲁棒性,在不同的实验场景下都能有效地检测和识

一种基于红外视觉的无人直升机着舰引导控制方法.pdf
本发明公开了一种基于红外视觉的无人直升机着舰引导控制方法,采用红外识别标志作为舰艇甲板上的识别标志,无人直升机采用设置了红外滤光片的摄像机对合作目标进行拍摄。处理时,首先对拍摄的图像进行滤波,并采用阀值化的方法进行二值化处理;然后,进行轮廓提取,得到红外合作目标的轮廓;接着根据红外合作目标的轮廓计算其中心坐标,并计算出无人直升机相对于合作目标的位置误差以及甲板的姿态;最后,无人直升机的位置控制器根据位置误差调整无人直升机的位置,无人直升机根据甲板的姿态调整无人直升机的姿态。本发明控制简单,实时性好,精度高