
农业智能机器人水果采摘优化控制模型仿真.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

农业智能机器人水果采摘优化控制模型仿真.docx
农业智能机器人水果采摘优化控制模型仿真随着科技的不断发展,农业智能化已成为当今社会发展的必然趋势。机器人作为一种智能化的代表,其具有可编程性、高速度、高精度、高可靠性等特点,成为现代农业生产中不可或缺的一环。而水果采摘作为农业生产中的一项重要环节,比较依赖人力劳动。因此,在结合机器人技术的前提下,优化水果采摘的过程以提高工作效率和生产质量,显得尤为重要。农业智能机器人水果采摘所需具备的基本条件①感知环节感知环节需要对水果采摘现场进行实时地观测和记录。首先需要搭建一个可靠、稳定、实时的感知平台,利用数字图像
机器人智能控制模型建立与仿真研究.pdf
机器人智能控制模型建立与仿真研究一、引言机器人智能控制是机器人技术领域中极具挑战性且具有广泛应用前景的一项任务。智能控制可以提高机器人的运动精度、控制精度、反应速度和自主运动能力,从而扩展机器人应用领域,为人们的生产和生活带来更多的福利。为了实现机器人的智能控制,需要建立机器人的控制模型,并进行数字仿真研究,以便更好地了解机器人的动态特性、掌握机器人的控制规律和优化机器人控制策略。本文将介绍机器人智能控制模型的建立方法和仿真技术,重点讨论了机器人的动力学建模和控制器设计方法,以及机器人运动过程中的动态模拟

智能移动水果采摘机器人的设计.docx
智能移动水果采摘机器人的设计摘要设计一种机器人用来移动水果和采摘水果的智能产物。该机器人由尾端执行器、采摘机械臂、横向的移动机构、智能移动平台以及相关的控制系统组成由C语言程序编写的控制程序开发人机能够相互交流的界面。整个系统工作性能较为稳定对成熟果实的正确识别率为81.5%成功采摘率为87.1%每个水果的采摘耗时平均为9.45s。关键词采摘机器人机器视觉移动平台水果中图分类号:TP242文献标识码:A0前言历年来水果生产
智能移动水果采摘机器人的设计.docx
智能移动水果采摘机器人的设计摘要设计一种机器人用来移动水果和采摘水果的智能产物。该机器人由尾端执行器、采摘机械臂、横向的移动机构、智能移动平台以及相关的控制系统组成由C语言程序编写的控制程序开发人机能够相互交流的界面。整个系统工作性能较为稳定对成熟果实的正确识别率为81.5%成功采摘率为87.1%每个水果的采摘耗时平均为9.45s。关键词采摘机器人机器视觉移动平台水果中图分类号:TP242文献标识码:A0前言历年来水果生产
一种水果采摘智能机器人.pdf
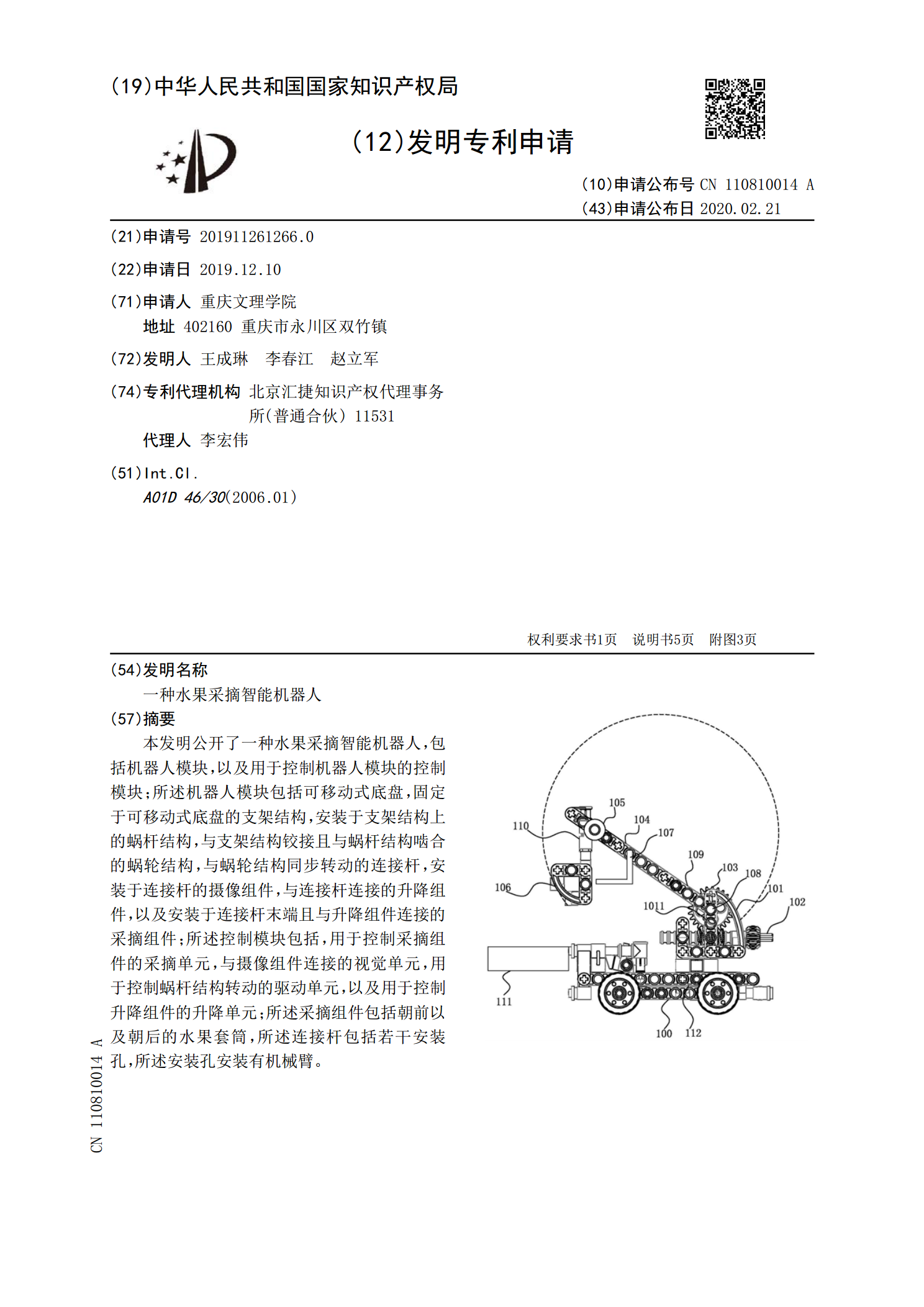
本发明公开了一种水果采摘智能机器人,包括机器人模块,以及用于控制机器人模块的控制模块;所述机器人模块包括可移动式底盘,固定于可移动式底盘的支架结构,安装于支架结构上的蜗杆结构,与支架结构铰接且与蜗杆结构啮合的蜗轮结构,与蜗轮结构同步转动的连接杆,安装于连接杆的摄像组件,与连接杆连接的升降组件,以及安装于连接杆末端且与升降组件连接的采摘组件;所述控制模块包括,用于控制采摘组件的采摘单元,与摄像组件连接的视觉单元,用于控制蜗杆结构转动的驱动单元,以及用于控制升降组件的升降单元;所述采摘组件包括朝前以及朝后的水