
MIMU高精度快速转停标定方法.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

MIMU高精度快速转停标定方法.docx
MIMU高精度快速转停标定方法标题:MIMU高精度快速转停标定方法摘要:惯性测量单元(MIMU)在航空航天、导航定位等领域扮演着重要角色。然而,由于硬件和环境的限制,MIMU的精度可能受到一定的影响。针对这一问题,本论文提出了一种基于高精度快速转停标定方法,旨在提高MIMU的精确性和性能。引言:MIMU是一种由加速度计和陀螺仪等传感器组成的惯性传感器系统,广泛应用于航空航天、导航定位、运动分析等领域。然而,传感器的非线性误差、温度效应、零漂等因素会导致MIMU输出的不准确性,影响其应用的可靠性。因此,进行

MIMU高精度快速转停标定方法.pptx
,目录PartOnePartTwo标定方法的概述标定方法的数学模型标定方法的实现流程标定方法的优点PartThree无人机领域的应用机器人领域的应用汽车领域的应用其他领域的应用PartFour实验设备介绍实验过程描述实验结果分析实验结论总结PartFive技术发展方向应用领域拓展未来研究展望THANKS

大视场摄像机高精度快速现场标定方法.docx
大视场摄像机高精度快速现场标定方法摘要:随着摄像技术的发展,现场标定方法在计算机视觉和机器人领域中变得越来越重要。本文针对大视场摄像机的高精度快速现场标定问题展开研究。首先,对大视场摄像机的标定原理和标定参数进行详细介绍。然后,提出了一种基于特征匹配和最小二乘法的快速标定方法。该方法通过特征点匹配算法得到初始标定结果,并利用最小二乘法对标定参数进行优化。实验结果表明,该方法能够在较短的时间内实现高精度的现场标定,适用于多种应用场景。关键词:大视场摄像机、现场标定、特征匹配、最小二乘法引言:随着计算机视觉和

高精度惯性陀螺仪误差系数的快速自标定方法研究.docx
高精度惯性陀螺仪误差系数的快速自标定方法研究【摘要】高精度惯性陀螺仪是一种非常重要的惯性导航仪器,其能够快速准确地测量物体的角速度。然而,由于各种因素的影响,高精度惯性陀螺仪的测量误差是难以避免的。因此,为了提高高精度惯性陀螺仪的精度和稳定性,需要进行误差系数的自标定研究。本文提出了一种快速自标定方法,可以有效地提高高精度惯性陀螺仪的精度和稳定性。【关键词】高精度惯性陀螺仪;误差系数;自标定;快速【正文】一、引言惯性陀螺仪是一种能够测量物体角速度的重要工具,其在航空、航天、导航等领域都有着广泛的应用。然而
手持多目相机高精度标定方法.pdf
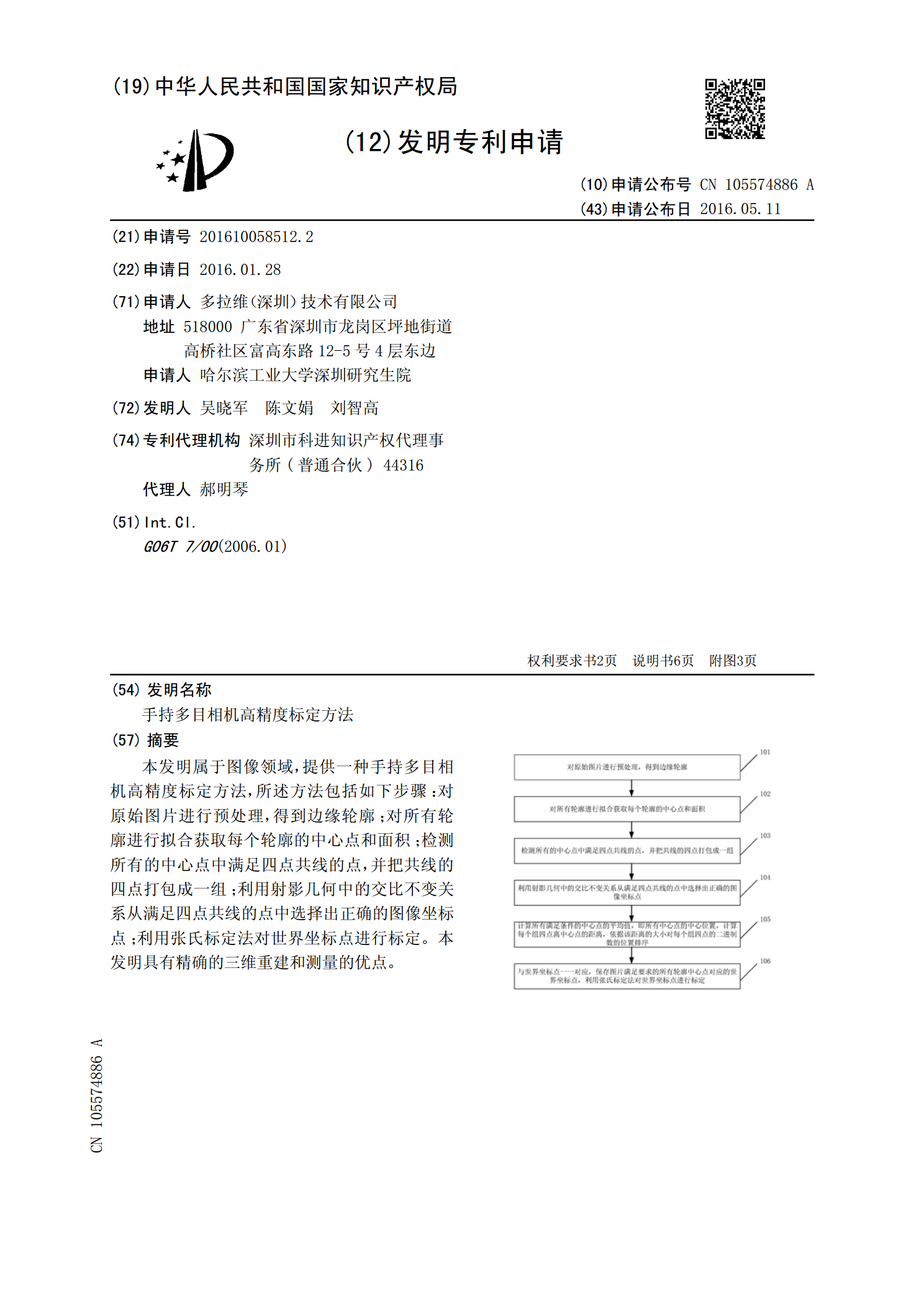
本发明属于图像领域,提供一种手持多目相机高精度标定方法,所述方法包括如下步骤:对原始图片进行预处理,得到边缘轮廓;对所有轮廓进行拟合获取每个轮廓的中心点和面积;检测所有的中心点中满足四点共线的点,并把共线的四点打包成一组;利用射影几何中的交比不变关系从满足四点共线的点中选择出正确的图像坐标点;利用张氏标定法对世界坐标点进行标定。本发明具有精确的三维重建和测量的优点。