
手持多目相机高精度标定方法.pdf

和裕****az

1/10

2/10

3/10

4/10
5/10
6/10
7/10

8/10
9/10
10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
手持多目相机高精度标定方法.pdf
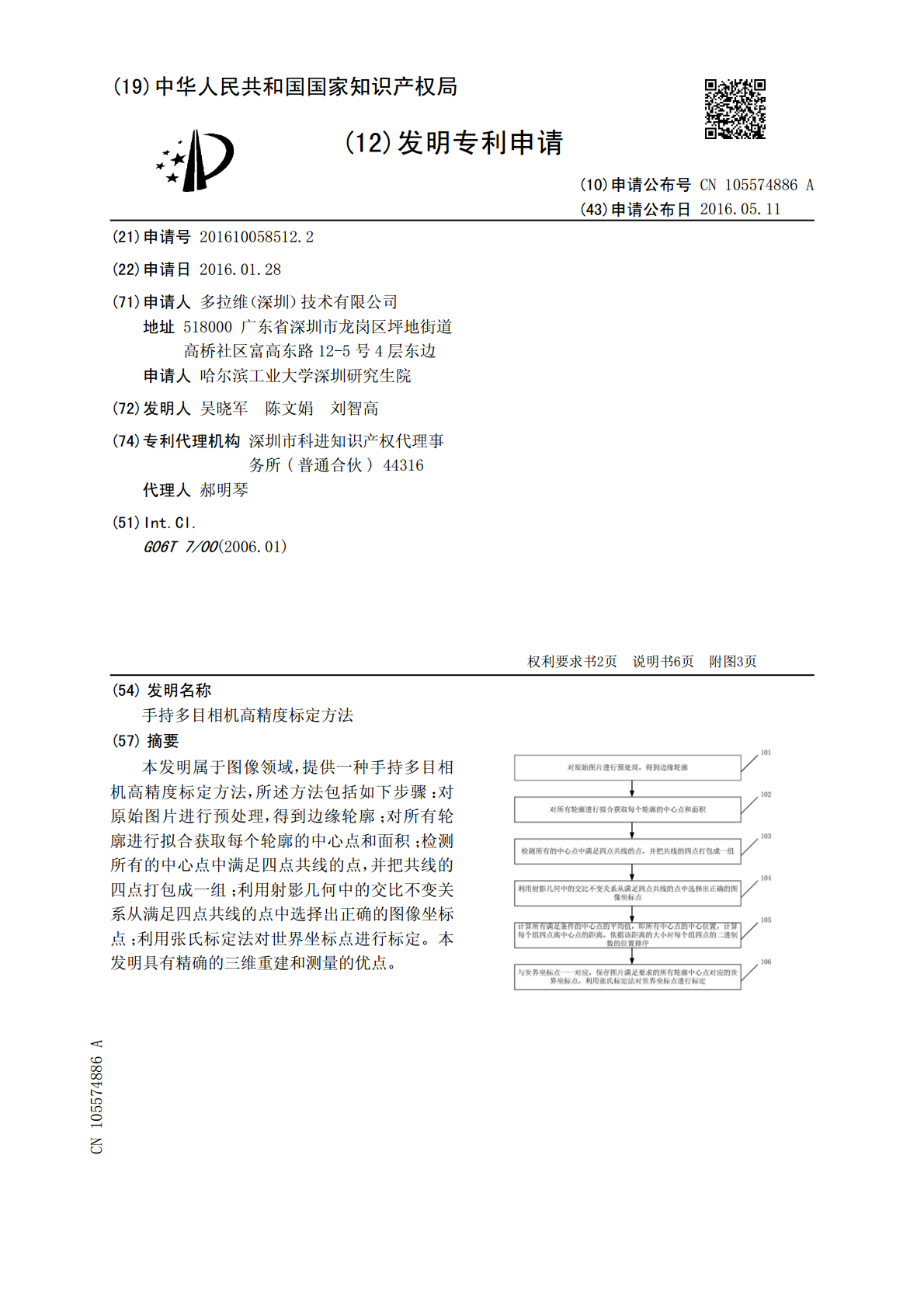
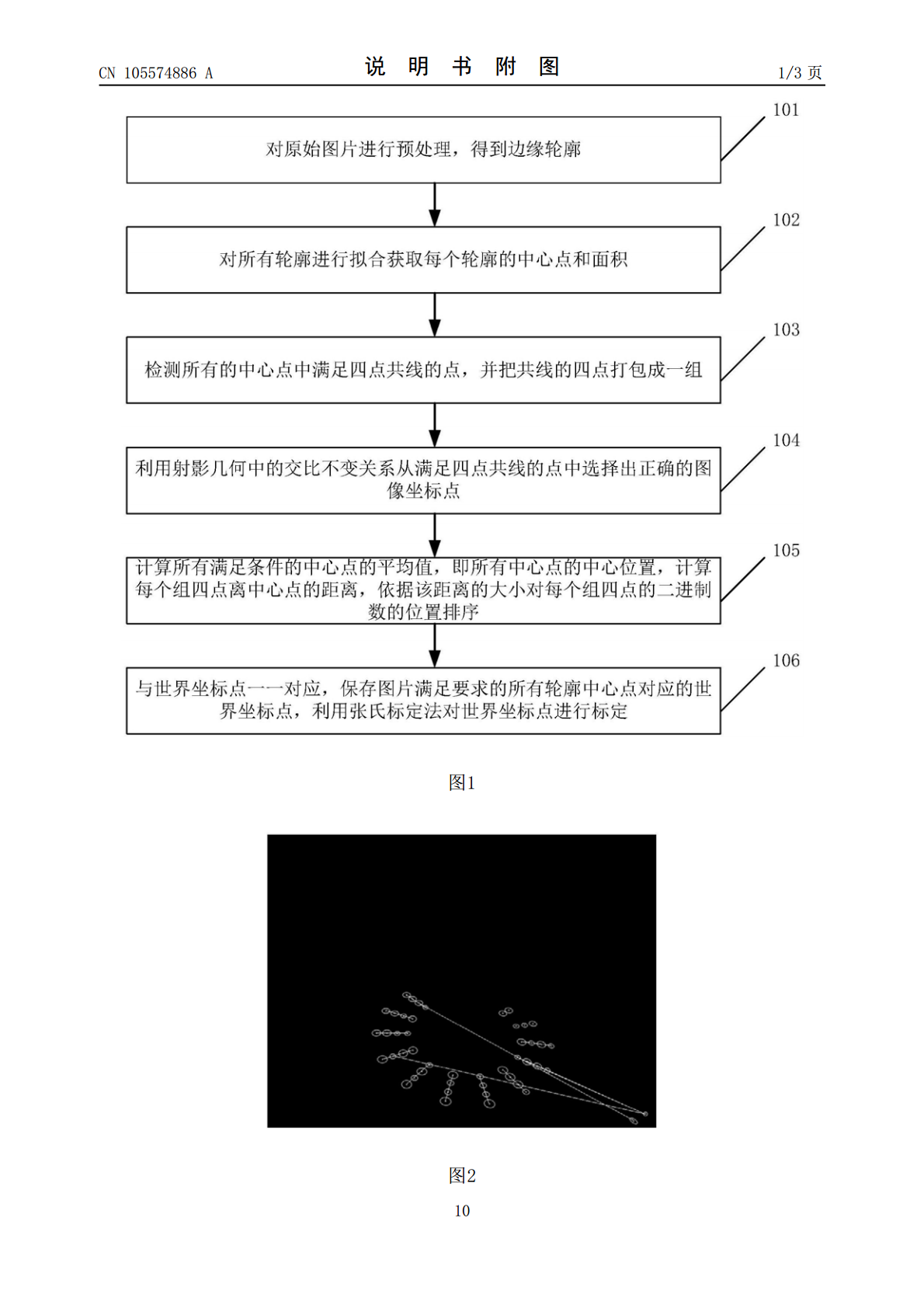
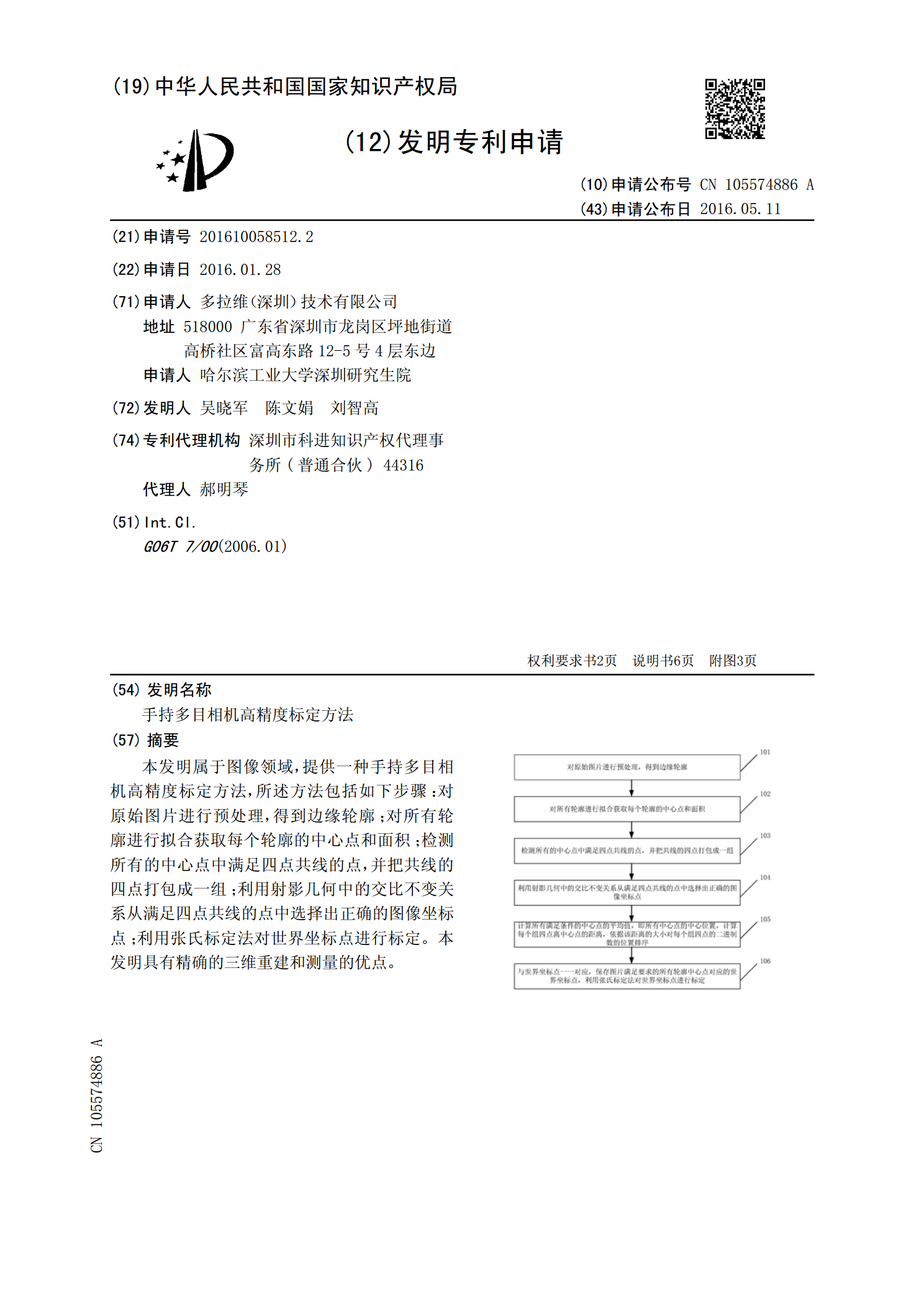
本发明属于图像领域,提供一种手持多目相机高精度标定方法,所述方法包括如下步骤:对原始图片进行预处理,得到边缘轮廓;对所有轮廓进行拟合获取每个轮廓的中心点和面积;检测所有的中心点中满足四点共线的点,并把共线的四点打包成一组;利用射影几何中的交比不变关系从满足四点共线的点中选择出正确的图像坐标点;利用张氏标定法对世界坐标点进行标定。本发明具有精确的三维重建和测量的优点。
基于道路特征的多目相机标定方法、装置、设备和介质.pdf
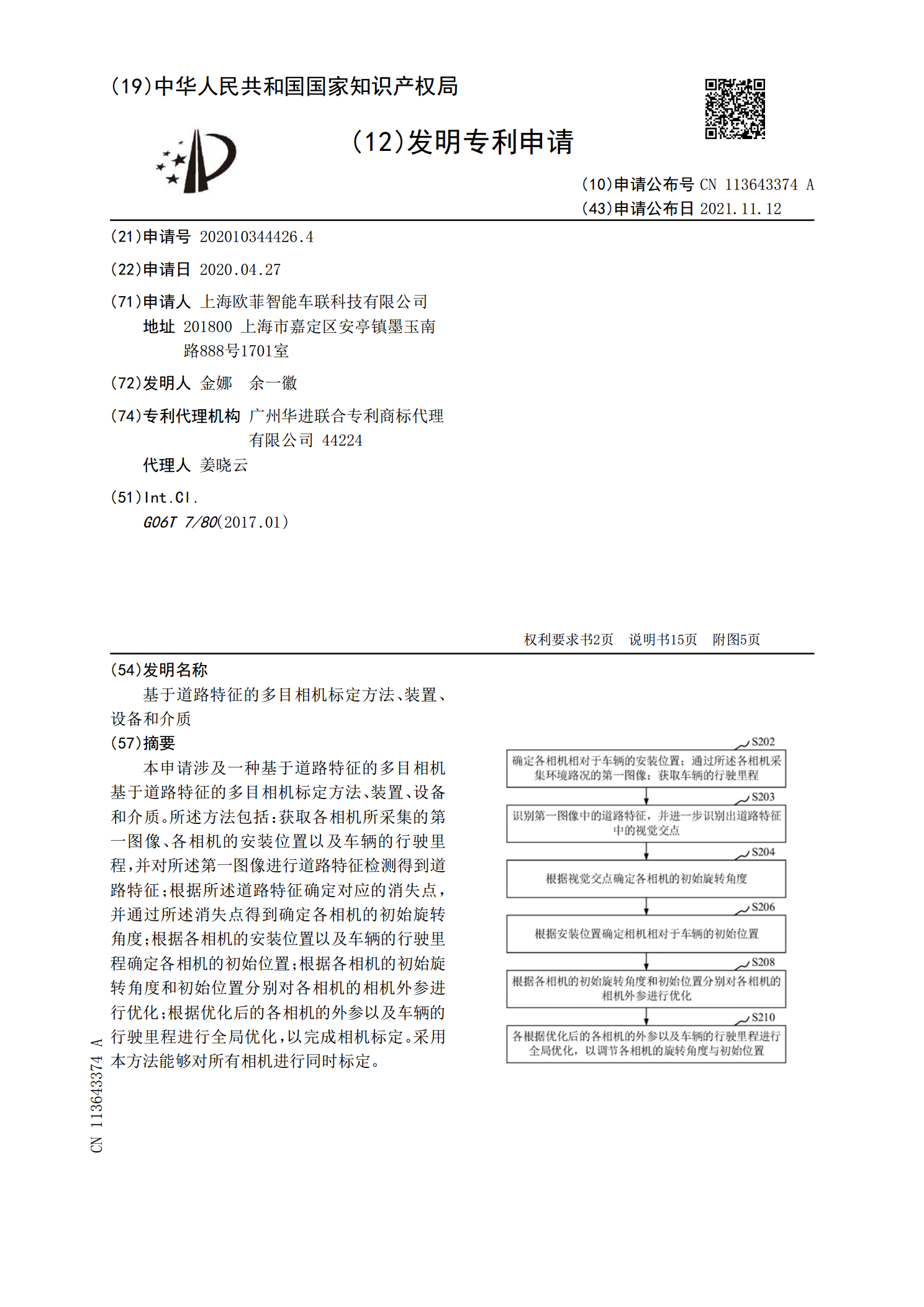
本申请涉及一种基于道路特征的多目相机基于道路特征的多目相机标定方法、装置、设备和介质。所述方法包括:获取各相机所采集的第一图像、各相机的安装位置以及车辆的行驶里程,并对所述第一图像进行道路特征检测得到道路特征;根据所述道路特征确定对应的消失点,并通过所述消失点得到确定各相机的初始旋转角度;根据各相机的安装位置以及车辆的行驶里程确定各相机的初始位置;根据各相机的初始旋转角度和初始位置分别对各相机的相机外参进行优化;根据优化后的各相机的外参以及车辆的行驶里程进行全局优化,以完成相机标定。采用本方法能够对所有相

一种全景多目相机位置标定装置及方法.pdf
本发明揭示了一种全景多目相机位置标定装置及方法,装置包括球状壳体、升降机构和上位机,球状壳体的内表面设有用于标定相机位置的标定图案,升降机构使全景多目相机穿过球状壳体的开口部进入球状壳体内部。当移动到位后,上位机控制全景多目相机拍摄球状壳体内表面的标定图案。全景多目相机拍摄标定图案后,将图像发送至上位机中,上位机根据获取到的图像进行分析,以进行相机位置标定。本发明能够提高相机位置标定的准确性。
一种多目相机三维系统及其标定方法.pdf
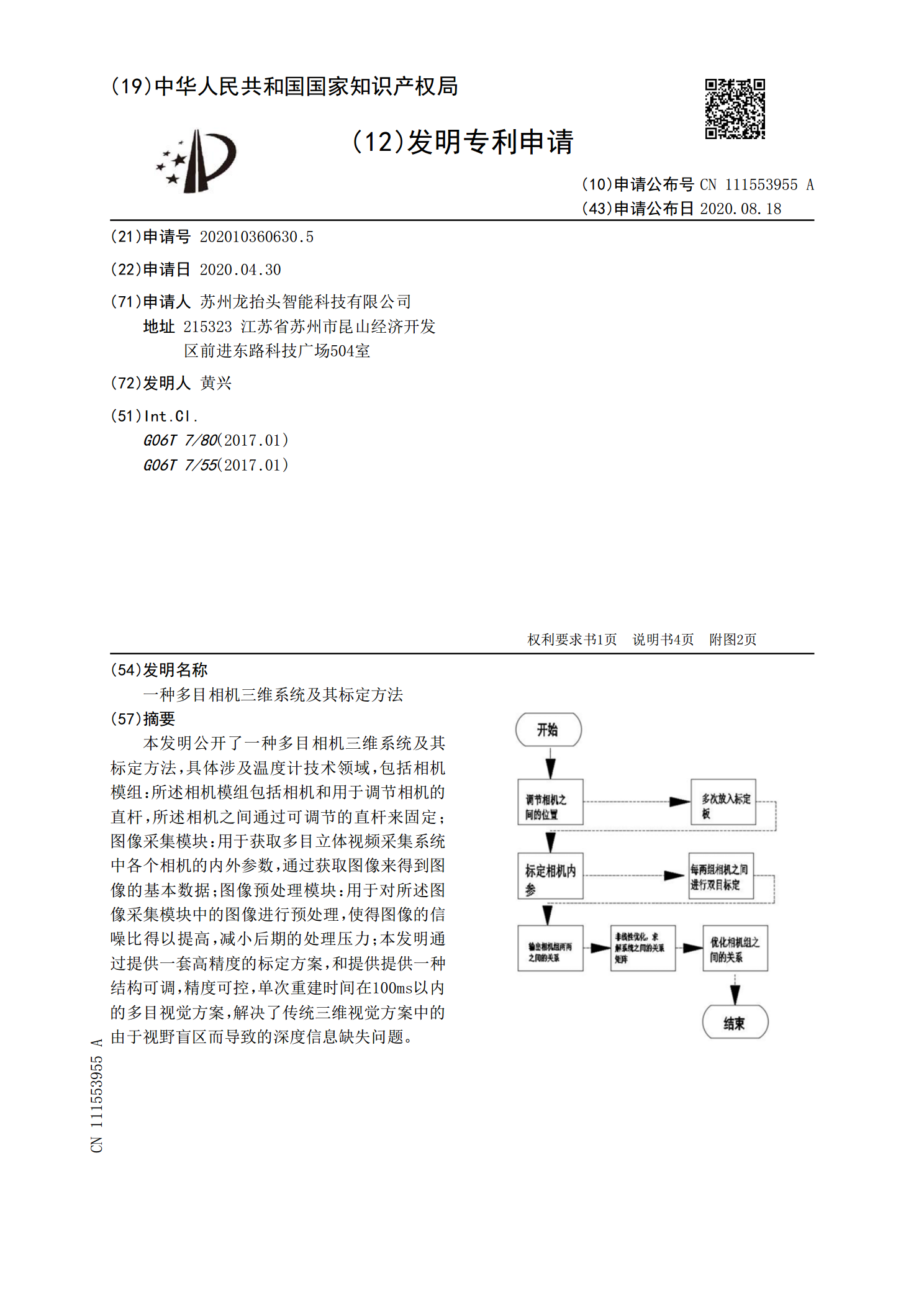
本发明公开了一种多目相机三维系统及其标定方法,具体涉及温度计技术领域,包括相机模组:所述相机模组包括相机和用于调节相机的直杆,所述相机之间通过可调节的直杆来固定;图像采集模块:用于获取多目立体视频采集系统中各个相机的内外参数,通过获取图像来得到图像的基本数据;图像预处理模块:用于对所述图像采集模块中的图像进行预处理,使得图像的信噪比得以提高,减小后期的处理压力;本发明通过提供一套高精度的标定方案,和提供提供一种结构可调,精度可控,单次重建时间在100ms以内的多目视觉方案,解决了传统三维视觉方案中的由于视

基于稀疏字典学习的单目相机标定方法.docx
基于稀疏字典学习的单目相机标定方法基于稀疏字典学习的单目相机标定方法摘要:近年来,稀疏字典学习方法在计算机视觉领域得到了广泛的应用。然而,在单目相机标定中,传统的标定方法往往需要收集大量的标定图像,并且对图像特征进行提取和匹配。本文提出了一种基于稀疏字典学习的单目相机标定方法,通过学习相机内外参数,并利用稀疏表示的方法进行相机标定。实验结果表明,该方法能够通过少量的标定图像准确地获取相机的内外参数,提高了相机标定的效率和精度。关键词:稀疏字典学习、单目相机标定、内外参数、稀疏表示1.引言单目相机标定是计算