
防疫消毒机器人的设计与开发研究.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

防疫消毒机器人的设计与开发研究.docx
防疫消毒机器人的设计与开发研究防疫消毒机器人的设计与开发研究摘要:在全球范围内,突发公共卫生事件的频发引发了对防疫措施的高度重视。为应对这一挑战,防疫消毒机器人的设计与开发成为了研究的热点之一。本论文以防疫消毒机器人的设计与开发为主题,从机器人的构成、运动控制、智能感知、消毒方式和安全性等多个方面展开研究,旨在为应对突发公共卫生事件提供有力支持。1.引言随着全球化的进程,人与人之间的交流日益频繁,突发公共卫生事件的发生率也逐渐上升。在此背景下,如何及时有效地消除病原体成为了全社会的共同课题。传统的消毒方式

防疫消毒机器人的设计与开发研究的开题报告.docx
防疫消毒机器人的设计与开发研究的开题报告一、选题背景新型冠状病毒肆虐全球,防疫消毒成为当前最重要的任务。针对传统的手动消毒存在效率低、安全难以保障等问题,机器人防疫消毒成为越来越受关注的解决方案。机器人防疫消毒具有安全高效、精准、无污染等优点,可以对呼吸道病毒、细菌等有极强的杀灭力,从而保障大众健康。因此,防疫消毒机器人的设计与开发研究显得尤为重要。二、研究目标本次研究的目标是设计一种防疫消毒机器人,运用机器视觉、自主定位、路径规划等技术,实现智能化防疫消毒。具体目标如下:1.基于ROS平台开发机器人系统

防疫消毒机器人的设计与开发研究的任务书.docx
防疫消毒机器人的设计与开发研究的任务书任务书防疫消毒机器人的设计与开发研究一、任务概述新冠病毒肆虐全球,人们更加重视卫生防疫工作,消毒工作的重要性逐渐受到重视。针对此情况,我们团队决定设计一款防疫消毒机器人,通过自主避障、导航、自动洒液等功能,帮助用户自动完成一定面积的消毒工作。本项目涉及机器人、控制、电路、机械设计等多个领域,需要全面的技术储备和研究。同时,还要考虑到机器人的安全性、稳定性、可靠性等因素。二、研究目标本项目的主要研究目标是:1.设计一款防疫消毒机器人,实现自主避障、导航、自动洒液等功能,
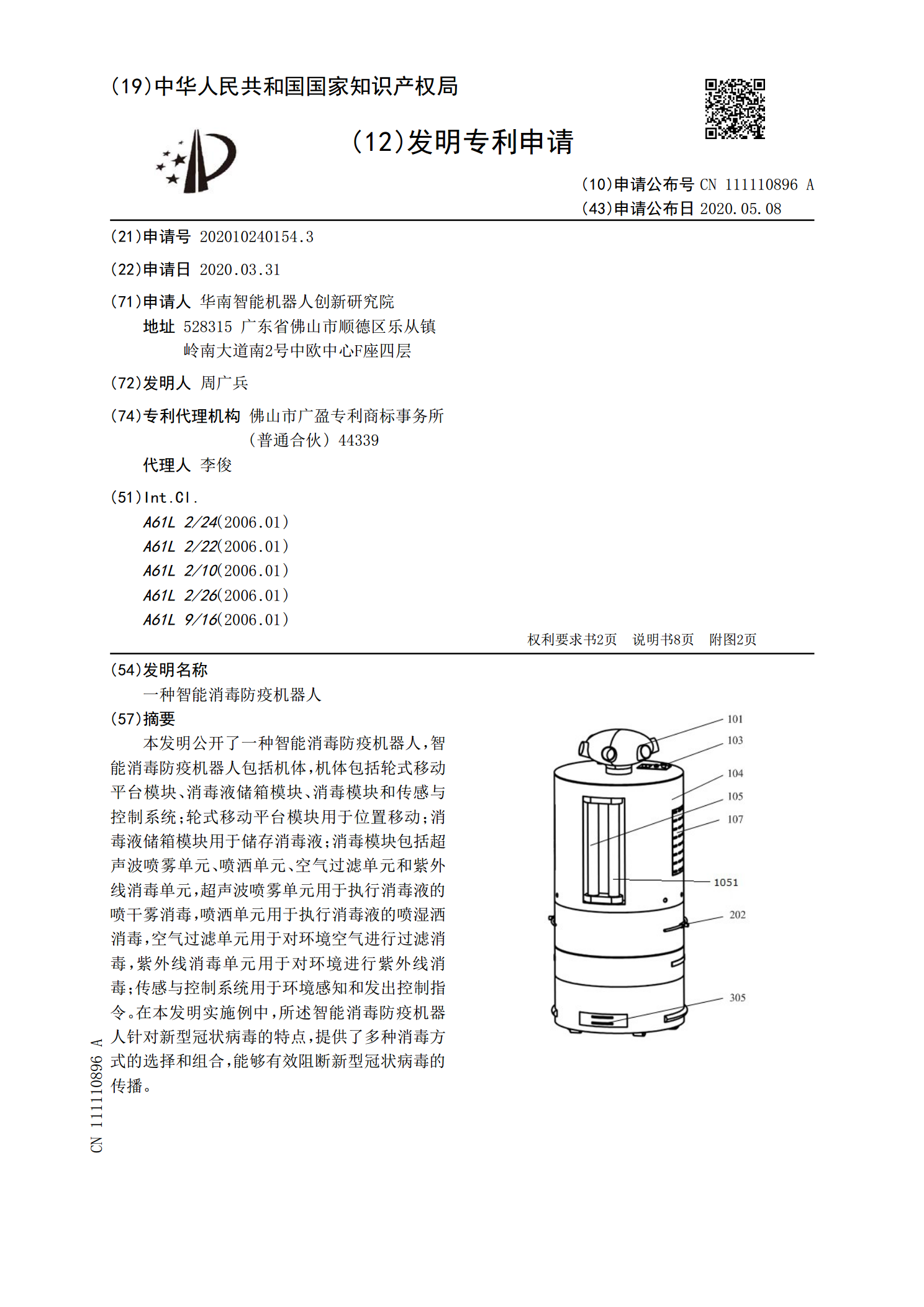
一种智能消毒防疫机器人.pdf
本发明公开了一种智能消毒防疫机器人,智能消毒防疫机器人包括机体,机体包括轮式移动平台模块、消毒液储箱模块、消毒模块和传感与控制系统;轮式移动平台模块用于位置移动;消毒液储箱模块用于储存消毒液;消毒模块包括超声波喷雾单元、喷洒单元、空气过滤单元和紫外线消毒单元,超声波喷雾单元用于执行消毒液的喷干雾消毒,喷洒单元用于执行消毒液的喷湿洒消毒,空气过滤单元用于对环境空气进行过滤消毒,紫外线消毒单元用于对环境进行紫外线消毒;传感与控制系统用于环境感知和发出控制指令。在本发明实施例中,所述智能消毒防疫机器人针对新型冠
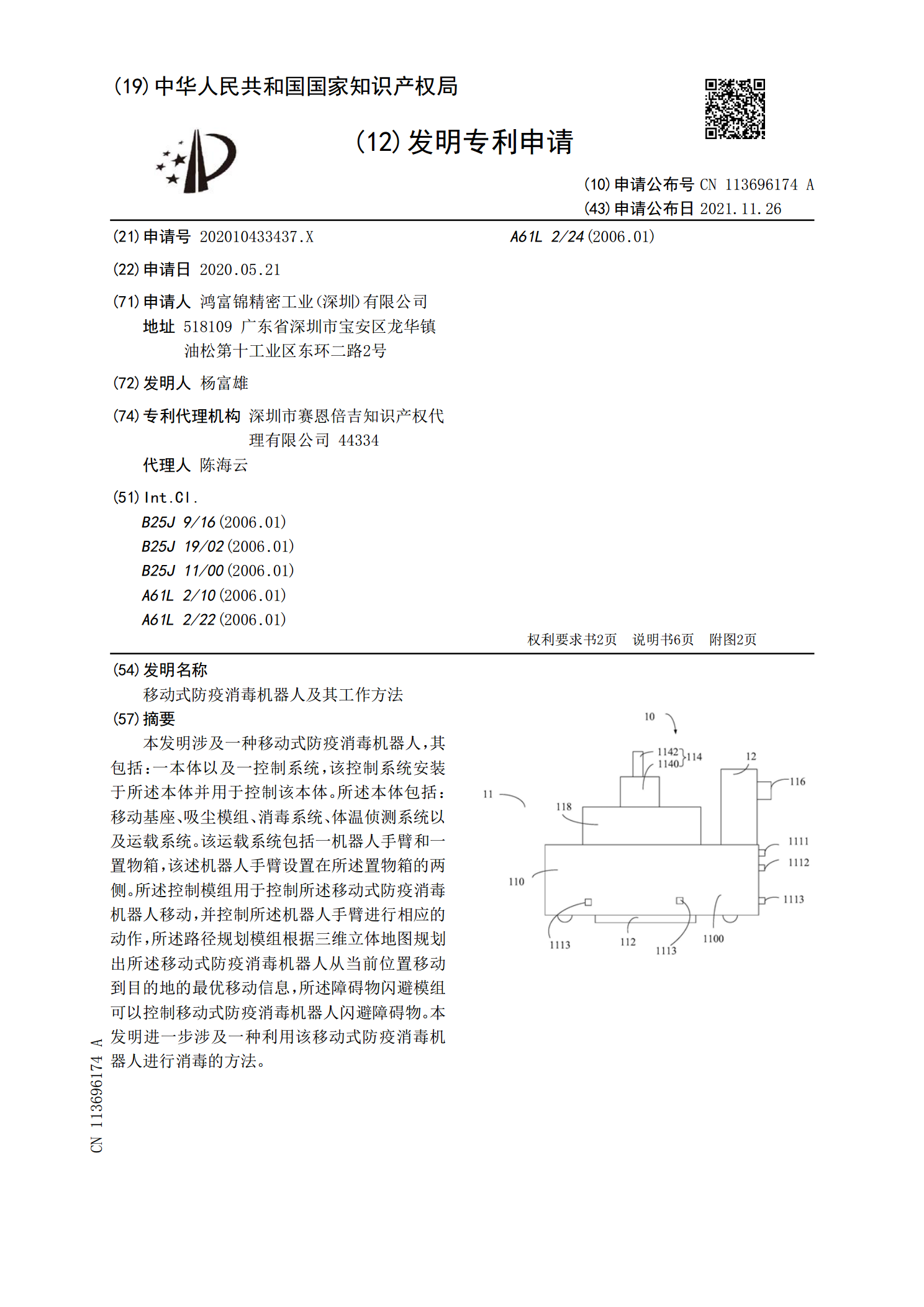
移动式防疫消毒机器人及其工作方法.pdf
本发明涉及一种移动式防疫消毒机器人,其包括:一本体以及一控制系统,该控制系统安装于所述本体并用于控制该本体。所述本体包括:移动基座、吸尘模组、消毒系统、体温侦测系统以及运载系统。该运载系统包括一机器人手臂和一置物箱,该述机器人手臂设置在所述置物箱的两侧。所述控制模组用于控制所述移动式防疫消毒机器人移动,并控制所述机器人手臂进行相应的动作,所述路径规划模组根据三维立体地图规划出所述移动式防疫消毒机器人从当前位置移动到目的地的最优移动信息,所述障碍物闪避模组可以控制移动式防疫消毒机器人闪避障碍物。本发明进一步