
一种行星齿轮传动机构、机器人关节减速器和机器人.pdf

一只****懿呀


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种行星齿轮传动机构、机器人关节减速器和机器人.pdf
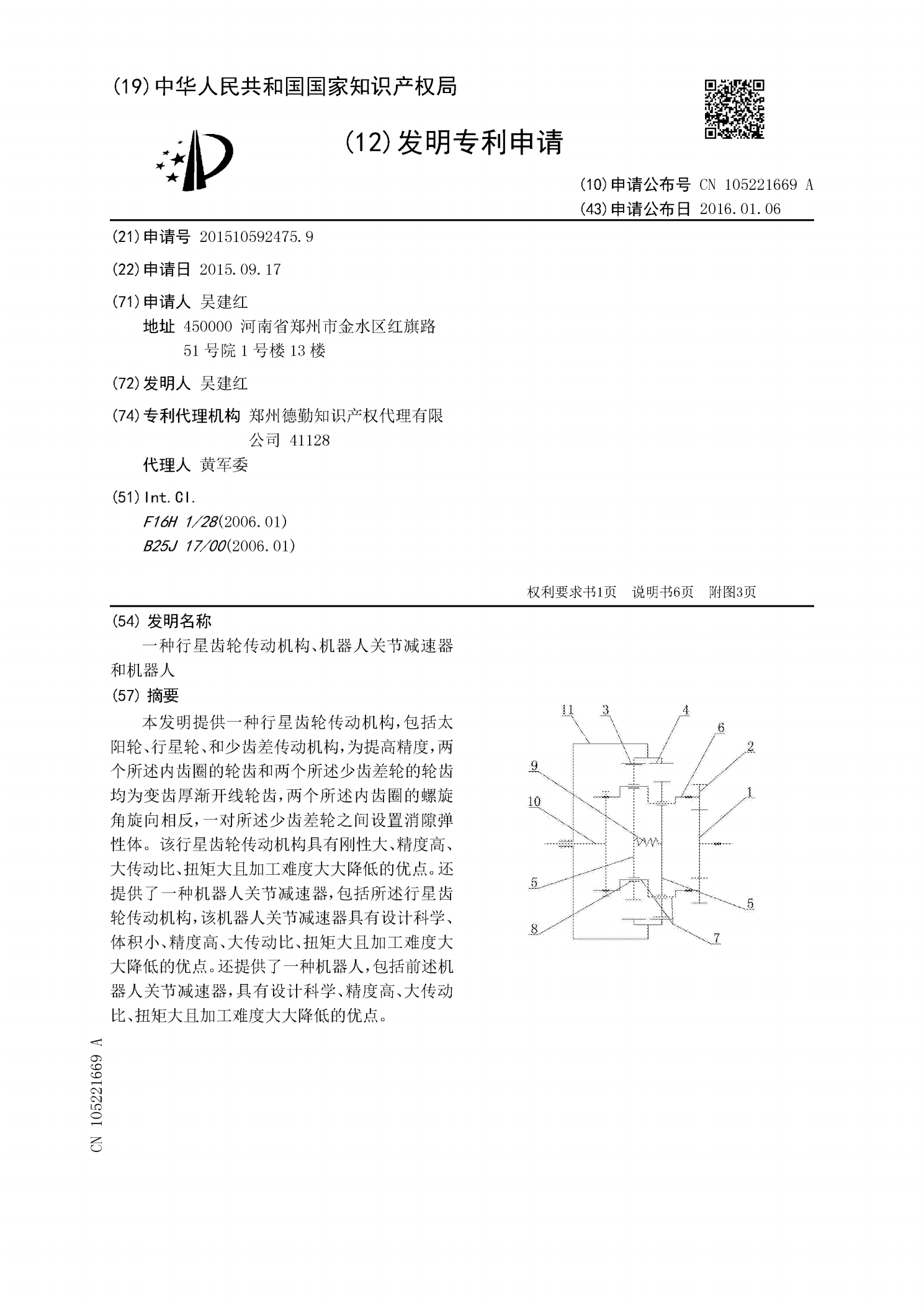
本发明提供一种行星齿轮传动机构,包括太阳轮、行星轮、和少齿差传动机构,为提高精度,两个所述内齿圈的轮齿和两个所述少齿差轮的轮齿均为变齿厚渐开线轮齿,两个所述内齿圈的螺旋角旋向相反,一对所述少齿差轮之间设置消隙弹性体。该行星齿轮传动机构具有刚性大、精度高、大传动比、扭矩大且加工难度大大降低的优点。还提供了一种机器人关节减速器,包括所述行星齿轮传动机构,该机器人关节减速器具有设计科学、体积小、精度高、大传动比、扭矩大且加工难度大大降低的优点。还提供了一种机器人,包括前述机器人关节减速器,具有设计科学、精度高、

用于机器人或机械臂关节的行星传动减速器.pdf
本发明公开了一种用于机器人或机械臂关节的行星传动减速器,包括太阳轮、行星架、驱动件、至少一个行星轮,控制件、第一内齿圈及第二内齿圈;控制件控制驱动件可选择地驱动太阳轮或太阳轮和行星架一起转动;行星轮与太阳轮啮合、第一内齿圈及第二内齿圈均与行星轮啮合,且第一内齿圈和第二内齿圈的齿数不同。本发明利用太阳轮、行星架、行星轮、第一内齿圈及第二内齿圈形成一个行星齿轮减速结构,使得结构紧凑,减小了体积;且同时设置第一内齿圈和第二内齿圈,提高了减速传动比;使得在使用的过程中,第二内齿圈一直有输出,从而通过第二内齿圈或第

行星齿轮传动和行星齿轮减速器.pptx
行星齿轮传动及行星齿轮减速器引言:一、周转轮系旳构成1.定义:周转轮系图例:2.周转轮系旳构成:二、周转轮系旳分类1.按周转轮系旳自由度分:2.按基本构件旳构成份:周转轮系分类图例(1):周转轮系分类图例(2):三、周转轮系传动比旳计算1.定轴轮系传动比旳计算:2.周转轮系传动比计算基本思想:3.周转轮系传动比计算公式推导(1):转化轮系公式推导图例:3.周转轮系传动比计算公式推导(2):3.使用转化轮系传动比公式注意事项:示例:示例解答(1):示例解答(2):四、行星轮系中各轮齿数旳拟定1.满足传动比条
一种机器人及行星齿轮减速器.pdf
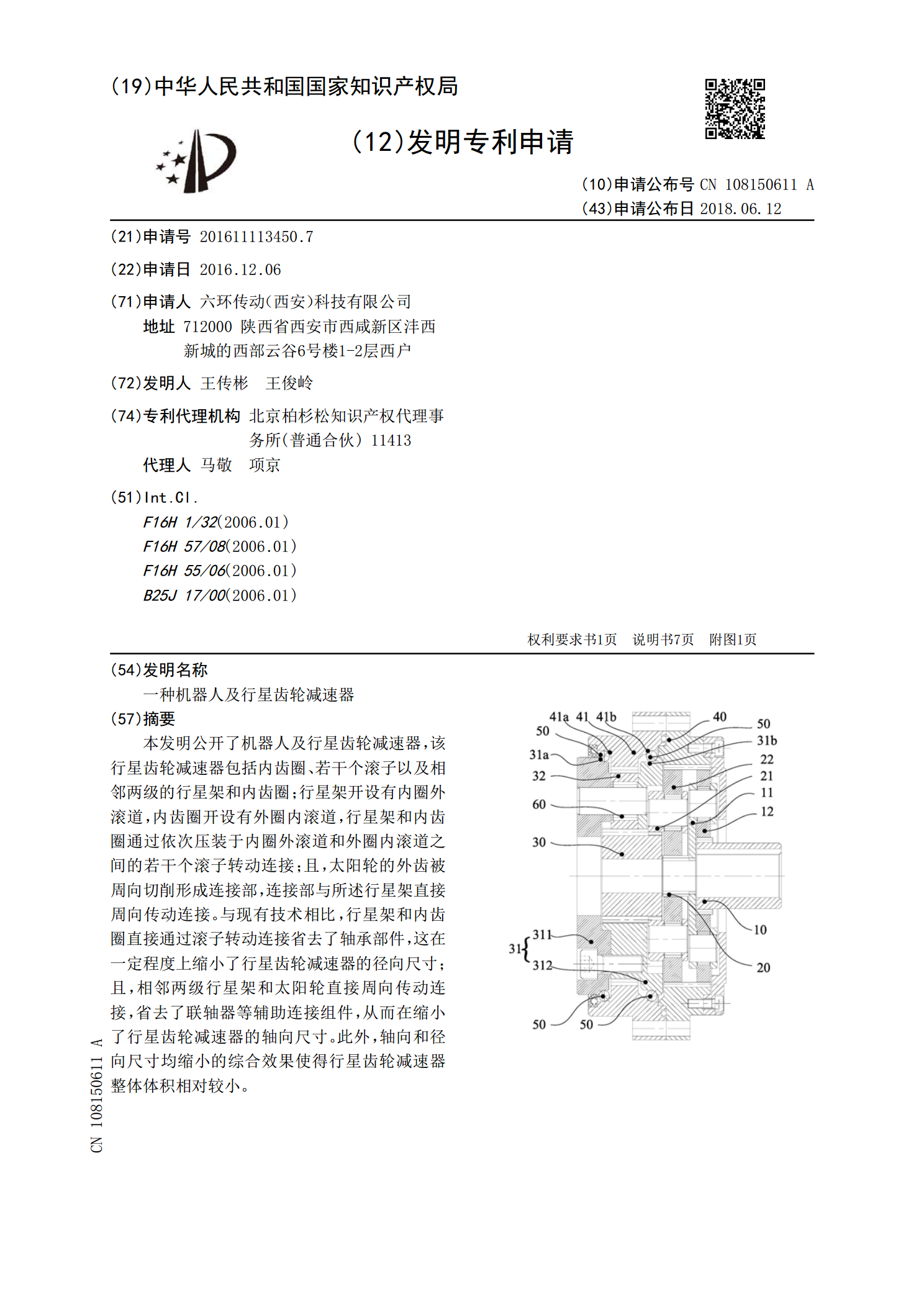
本发明公开了机器人及行星齿轮减速器,该行星齿轮减速器包括内齿圈、若干个滚子以及相邻两级的行星架和内齿圈;行星架开设有内圈外滚道,内齿圈开设有外圈内滚道,行星架和内齿圈通过依次压装于内圈外滚道和外圈内滚道之间的若干个滚子转动连接;且,太阳轮的外齿被周向切削形成连接部,连接部与所述行星架直接周向传动连接。与现有技术相比,行星架和内齿圈直接通过滚子转动连接省去了轴承部件,这在一定程度上缩小了行星齿轮减速器的径向尺寸;且,相邻两级行星架和太阳轮直接周向传动连接,省去了联轴器等辅助连接组件,从而在缩小了行星齿轮减速
一种机器人用行星齿轮减速器.pdf
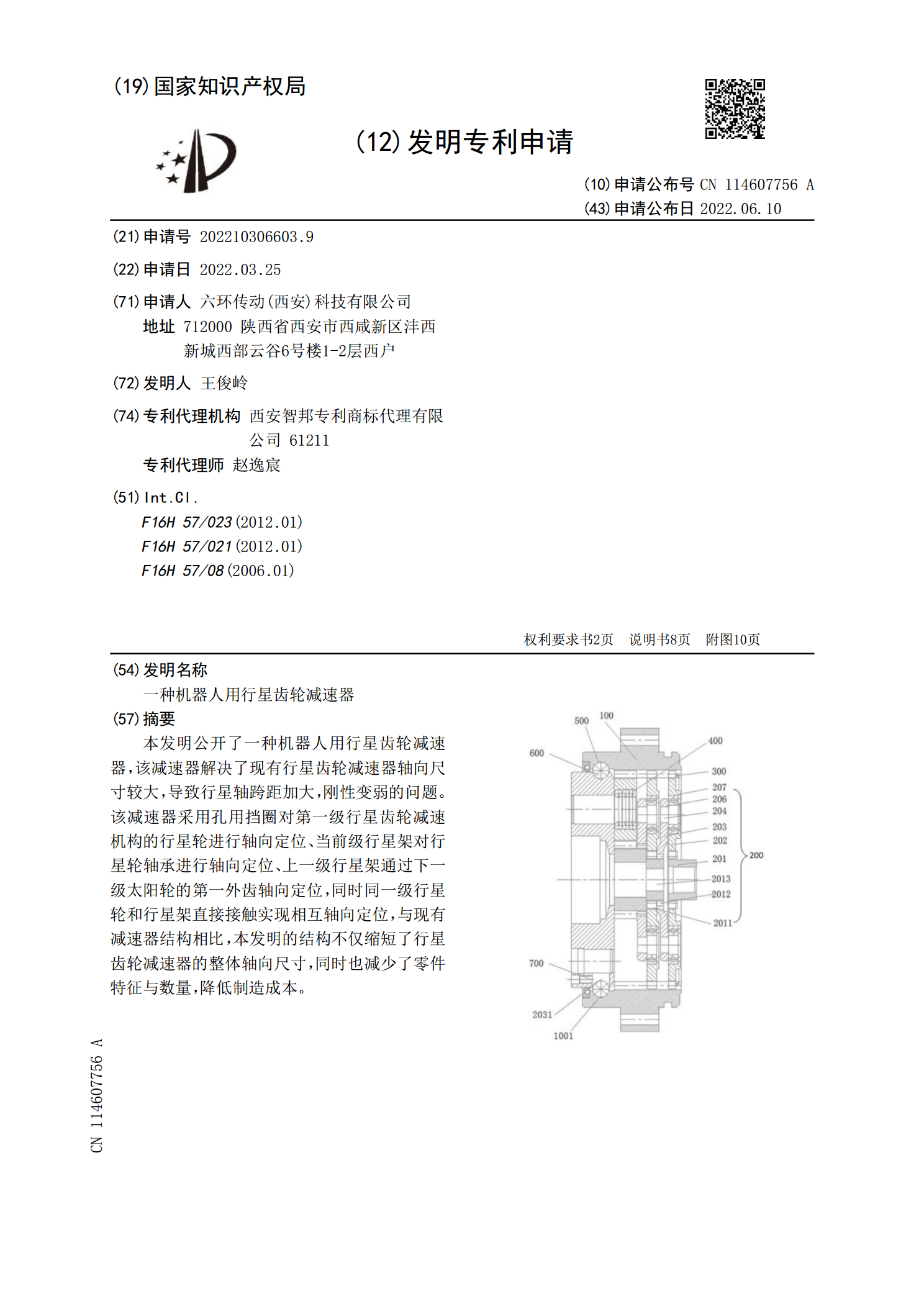
本发明公开了一种机器人用行星齿轮减速器,该减速器解决了现有行星齿轮减速器轴向尺寸较大,导致行星轴跨距加大,刚性变弱的问题。该减速器采用孔用挡圈对第一级行星齿轮减速机构的行星轮进行轴向定位、当前级行星架对行星轮轴承进行轴向定位、上一级行星架通过下一级太阳轮的第一外齿轴向定位,同时同一级行星轮和行星架直接接触实现相互轴向定位,与现有减速器结构相比,本发明的结构不仅缩短了行星齿轮减速器的整体轴向尺寸,同时也减少了零件特征与数量,降低制造成本。