
伺服电机培训A5培训.ppt

小新****ou

1/10
2/10
3/10
4/10
5/10

6/10
7/10
8/10
9/10
10/10
亲,该文档总共39页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

伺服电机培训A5培训.ppt
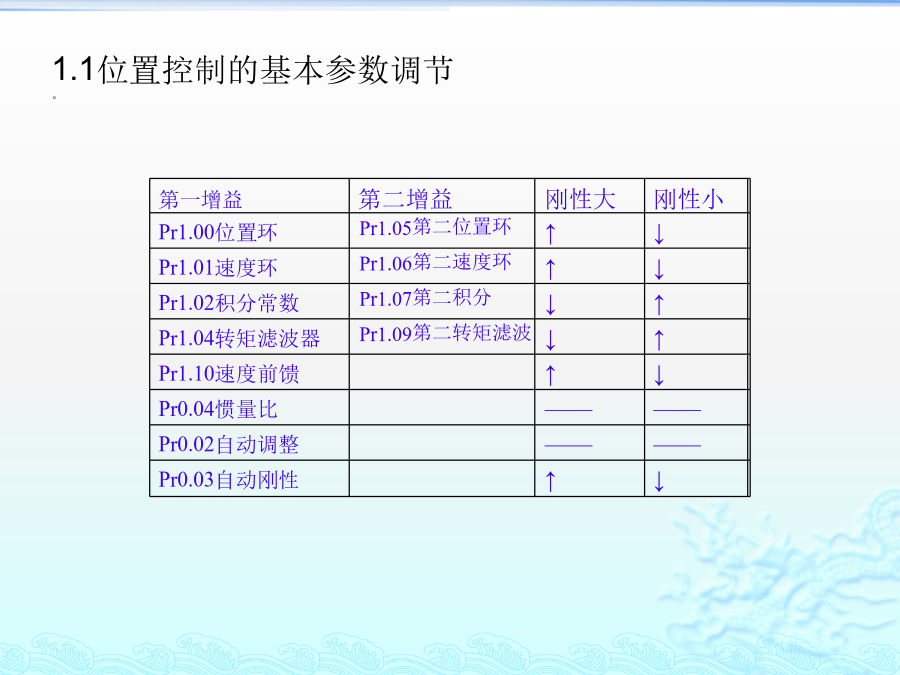
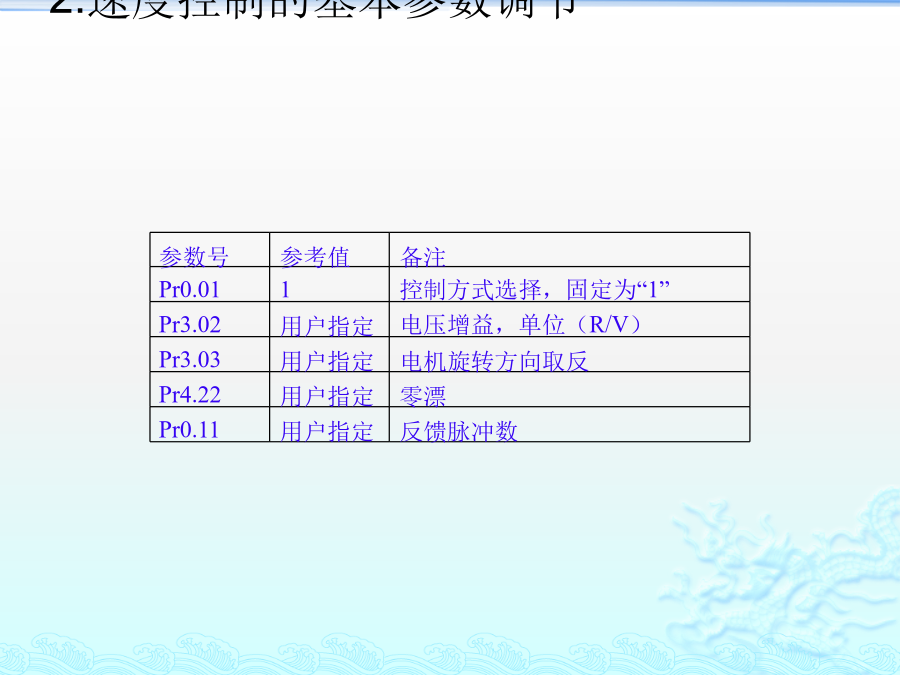
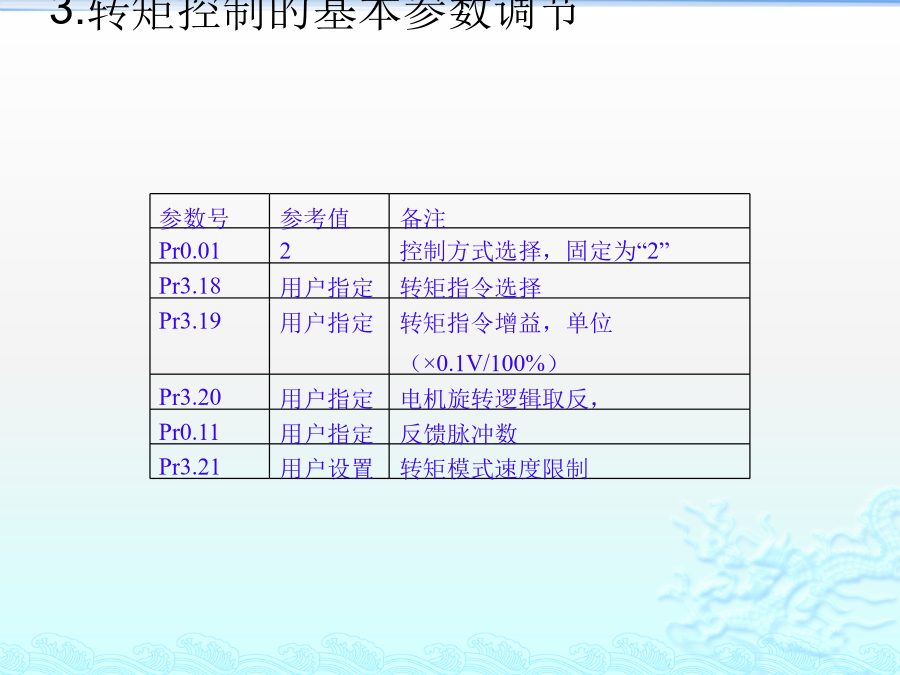
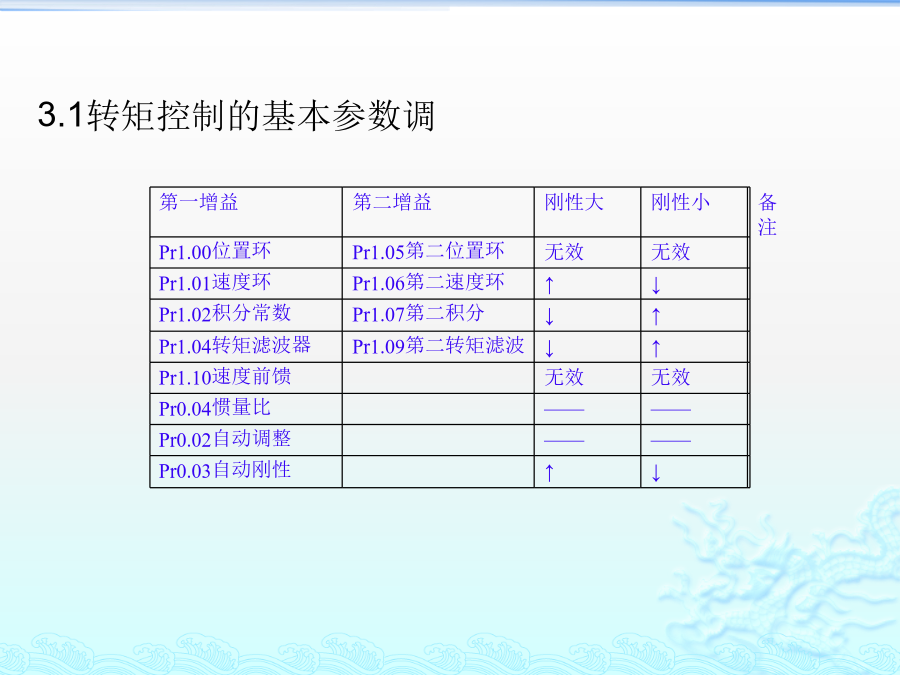
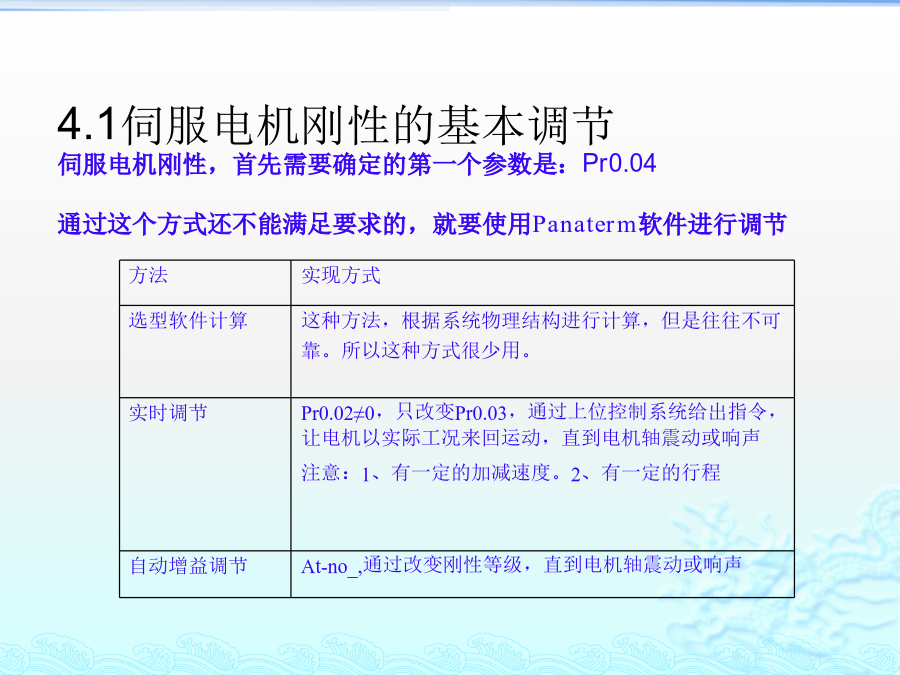
调整方法培训一.基本参数调节其实伺服电机我们所说的基本调节就是要确定下面几个方面的问题:控制方式(一共有三种)●位置控制●速度控制●转矩控制参数号第一增益参数号第一增益参数号第一增益4、伺服刚性的基本调节伺服电机的刚性,实际是伺服系统的增益大小但是可以从下面两方面来理解:1.系统跟随指令的一个指标2.系统抗干扰能力的一个指标方法速度环增益的设定•速度环增益——影响速度响应能力的参数,停止时,用手对联轴器加以外力,稍微提高速度环增益(每次30),直到由于扰动伺服发生振荡马上结束的值。•通过手的感觉来判断最好

伺服电机知识培训.ppt
伺服电机知识培训一.伺服电机基本知识伺服来自英文单词Servo,指系统跟随外部指令进行人们所期望的运动,运动要素包括位置、速度和力矩。最常见的伺服是交流永磁同步伺服电机,伺服电机内部的转子是永磁铁,驱动器控制的U/V/W三相电在定子中形成变化的电磁场,转子在此磁场的作用下转动,同时电机自带的编码器反馈信号给驱动器,驱动器根据反馈值与目标值进行比较,调整转子转动的角度。伺服电机的精度决定于编码器的精度(线数)。最常见的是2500线标准编码器配置的伺服电机。伺服电动机又称执行电动机,在自动控制系统中,用作执行
伺服电机知识培训.ppt
伺服电机知识培训一.伺服电机基本知识伺服来自英文单词Servo,指系统跟随外部指令进行人们所期望的运动,运动要素包括位置、速度和力矩。最常见的伺服是交流永磁同步伺服电机,伺服电机内部的转子是永磁铁,驱动器控制的U/V/W三相电在定子中形成变化的电磁场,转子在此磁场的作用下转动,同时电机自带的编码器反馈信号给驱动器,驱动器根据反馈值与目标值进行比较,调整转子转动的角度。伺服电机的精度决定于编码器的精度(线数)。最常见的是2500线标准编码器配置的伺服电机。伺服电动机又称执行电动机,在自动控制系统中,用作执行

松下A5伺服电机驱动器调试步骤.docx
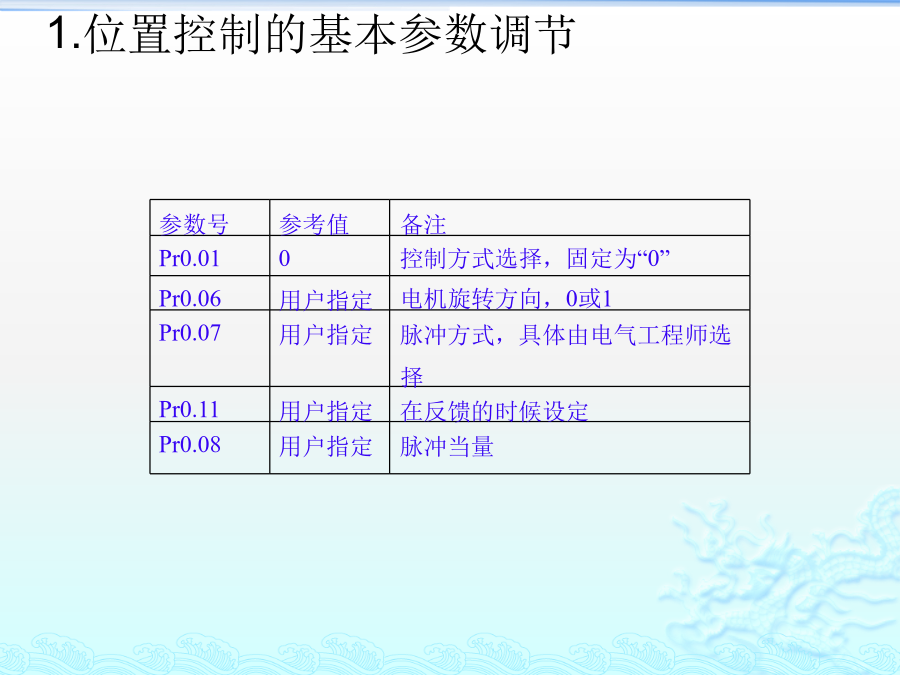
松下A5伺服电机驱动器调试步骤A:对于没有使用X5的调试步骤:(驱动器开环模式)应用中松下A5驱动器处于位置控制模式,需要调整的参数:参数值定义调整方法Pr0.010控制模式(0为位置控制模式)默认为0,不用改;Pr0.02先1后0设定是否自动调整;1自动,0非自动默认为1,让机台跑一段时间后设为0;Pr0.0310~16设定机台刚性从低到高调整,振动则减小;Pr0.050或1设定脉冲输入方式0:500Kbps(光电)1:4Mbps(长线)需要很高速度时可设为1,接线及计算方法参考后面Pr0.060设定指

松下A5伺服电机驱动器调试步骤.docx
松下A5伺服电机驱动器调试步骤A:对于没有使用X5的调试步骤:(驱动器开环模式)应用中松下A5驱动器处于位置控制模式,需要调整的参数:参数值定义调整方法Pr0.010控制模式(0为位置控制模式)默认为0,不用改;Pr0.02先1后0设定是否自动调整;1自动,0非自动默认为1,让机台跑一段时间后设为0;Pr0.0310~16设定机台刚性从低到高调整,振动则减小;Pr0.050或1设定脉冲输入方式0:500Kbps(光电)1:4Mbps(长线)需要很高速度时可设为1,接线及计算方法参考后面Pr0.060设定指