
一种轮式行走机构.pdf

猫巷****正德


1/8

2/8

3/8

4/8

5/8

6/8

7/8

8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种轮式行走机构.pdf
本发明涉及一种行走机构,具体涉及一种对复杂地形具有较强适应能力的轮式行走机构;包括底盘,电机,运动分配器,减速器和4个功能结构相同的行走模块;电机设置在底盘上,与运动分配器相连,提供驱动力,4个行走模块对称设置在底盘的两侧,运动分配器通过减速器与其中2个对称设置的行走模块连接;位于底盘同侧的2个行走模块通过摇臂结构连接;每个行走模块采用行星轮系实现欠驱动车轮结构;单侧悬架有两个副摇臂和一个主摇臂,这种主副摇臂相结合的方式保证了车体在遇到障碍物冲击时减小俯仰程度,确保移动机器人在行进过程中8个车轮均能够着地

一种轮式联动越障行走机构.pdf
本发明涉及一种可根据地形状况自动调整的轮式联动越障行走机构,该联动越障行走机构由至少一个行走轮以及轮子边缘的越障连杆组成。轮子直径相等,轮子和越障连杆上分别设有定位孔,由活动销轴通过定位孔将轮子和越障连杆连在一起,轮子上的定位孔位置的选择应最大限度地靠近于轮子的圆周,且各个轮子的定位孔到各自轴心孔的距离要一致。轮子的轴心孔连接动力驱动装置的驱动轴。该越障行走机构在平地上行走时为圆轮行走,和普通的轮式行走机构相同,碰到障碍物时越障连杆会搭在障碍物上,轮子借助于连杆的支撑作用从而完成越障,是一种高效率、高可靠

一种轮式收割机的无级变速行走机构.pdf
本发明公开了一种轮式收割机的无级变速行走机构,包括变速箱、电控电控无级变速器、电器控制模块、倒车反馈装置和踏板控制装置,所述的踏板控制装置包括前进踏板和后退踏板,所述的前进踏板和后退踏板均通过信号输出线路与电器控制模块相连接;所述的电器控制模块通过反馈输出线路与倒车反馈装置相连接,所述的倒车反馈装置包括倒车喇叭和倒车灯;所述的电控电控无级变速器通过控制信号输入线路与电器控制模块相连接,所述电控电控无级变速器的动力输出轴与变速箱相连接。本发明中,使用的无级变速器由电控模块控制,只需要提供工作的电信号就能够轻
一种全地形轮式工程车辆的行走机构.pdf
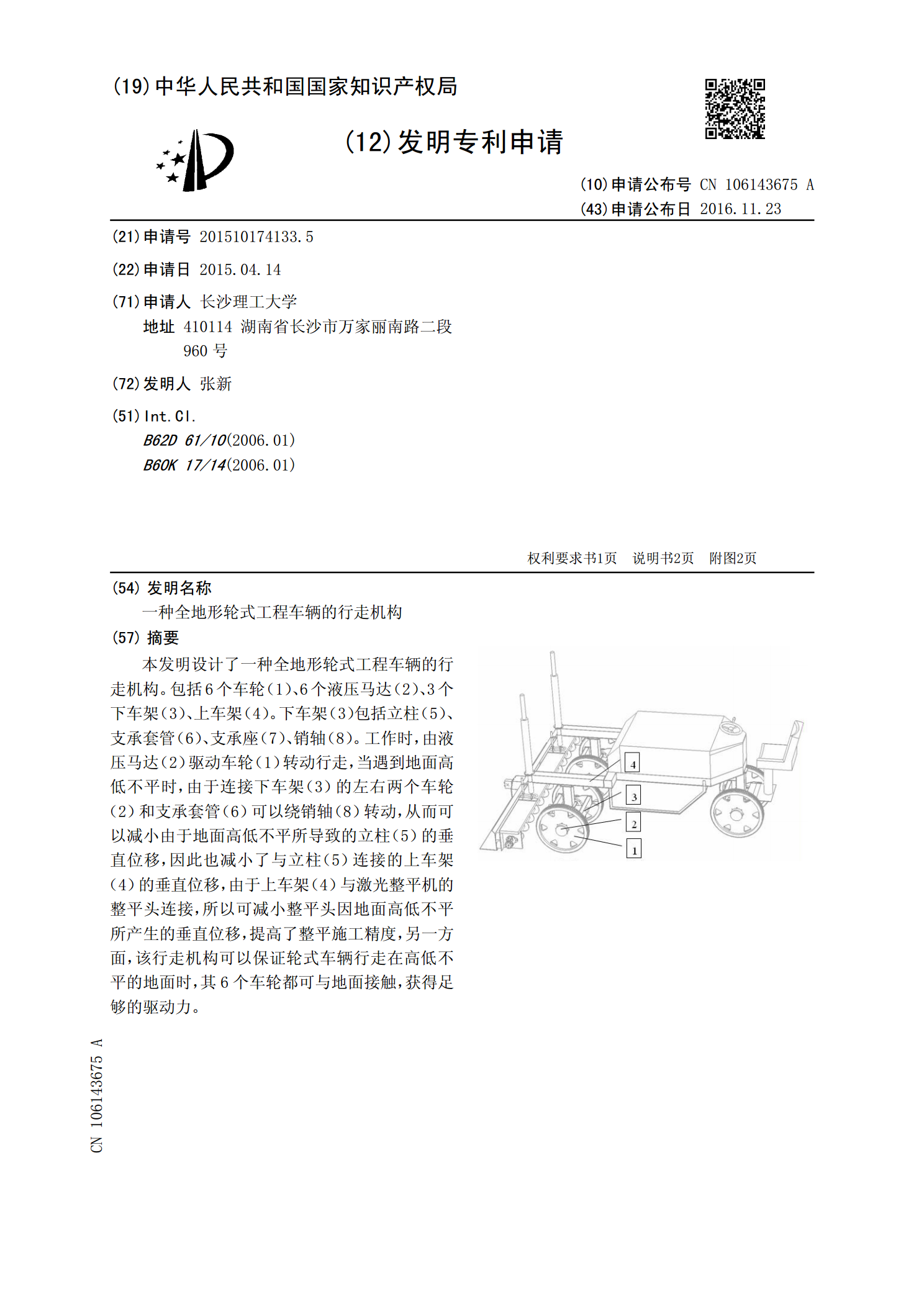
本发明设计了一种全地形轮式工程车辆的行走机构。包括6个车轮(1)、6个液压马达(2)、3个下车架(3)、上车架(4)。下车架(3)包括立柱(5)、支承套管(6)、支承座(7)、销轴(8)。工作时,由液压马达(2)驱动车轮(1)转动行走,当遇到地面高低不平时,由于连接下车架(3)的左右两个车轮(2)和支承套管(6)可以绕销轴(8)转动,从而可以减小由于地面高低不平所导致的立柱(5)的垂直位移,因此也减小了与立柱(5)连接的上车架(4)的垂直位移,由于上车架(4)与激光整平机的整平头连接,所以可减小整平头因地

复合轮式机器人行走机构.pdf
本发明公开了一种复合轮式机器人行走机构,包括底盘、大功率电机、控制器和四个复合轮式机构,所述大功率电机固定于所述底盘上,所述复合轮式机构包括一个十字行星架、两个主动轮和两个从动轮,所述主动轮和所述从动轮间隔设于所述十字行星架的架杆端部,所述大功率电机通过传动机构驱动所述十字行星架,所述主动轮分别通过小功率电机驱动,所述底盘两侧相对的两个所述十字行星架之间通过同步轴连接,所述同步轴上设有电刷开关,所述电刷开关包括定子和转子,所述转子套设于所述同步轴上,所述定子通过导线连接所述控制器,所述转子通过导线连接所述