
齿轮组装系统及齿轮组装方法.pdf

猫巷****盟主


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共26页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

齿轮组装系统及齿轮组装方法.pdf
本发明提供一种齿轮组装系统及齿轮组装方法,其高效且容易地使齿轮配合。实施方式的一个形态所涉及的齿轮组装系统具备机器人与控制装置。机器人一边把持齿轮一边将齿轮移动到规定的安装位置,从而安装这样的齿轮。控制装置对机器人的动作进行控制。另外,控制装置具备判别部、临时组装部、微量旋转部。判别部判别是否存在配合于相互不配合的齿轮即第1齿轮及第2齿轮之间的至少1个中间齿轮。在由判别部判别成存在中间齿轮时,临时组装部使机器人先行安装第1齿轮及第2齿轮,之后将中间齿轮临时组装在这样的中间齿轮的安装位置。在临时组装中间齿轮

行星齿轮组装装置以及行星齿轮的组装方法.pdf
本发明提供行星齿轮组装装置以及行星齿轮的组装方法。能够抑制齿顶的损伤、且能够使第一小齿轮与第二小齿轮相互啮合并高精度地组装于行星架。行星齿轮组装装置(1)的小齿轮组装机构(40)构成为:使第一小齿轮保持件(41)与第二小齿轮保持件(42)在以允许第一小齿轮(110)与第二小齿轮(120)朝与轴心大致正交的斜上方移动的方式倾斜的状态下相互接近,从而使该第一小齿轮(110)与第二小齿轮(120)在各自的轴心从铅垂方向倾斜的状态下相互啮合。

轨道交通齿轮箱齿轮组装工装及组装方法.pdf
本发明公开了一种轨道交通齿轮箱齿轮组装工装及组装方法,包括座体、定位基座和滑座,方法包括以下步骤:a、将齿轮箱箱体放在工装的定位基座上,使齿轮箱箱体的大孔法兰端面与齿轮箱箱体定位台阶贴合,b、齿轮经加热后,放在滑座的齿轮放置凹槽上,c、推动滑座朝定位基座及齿轮箱箱体移动,使齿轮落在定位基座上,使齿轮端面与定位基座的齿轮定位凹槽贴合,d、将车轴吊至工装的上方,且插入齿轮的轮毂内,直至车轴端面与底座或定位垫块的端面贴合,e、通过齿轮上的注油孔向齿轮的轮毂内注油,待油从齿轮的端面与车轴结合处冒出后停止注油,冷却
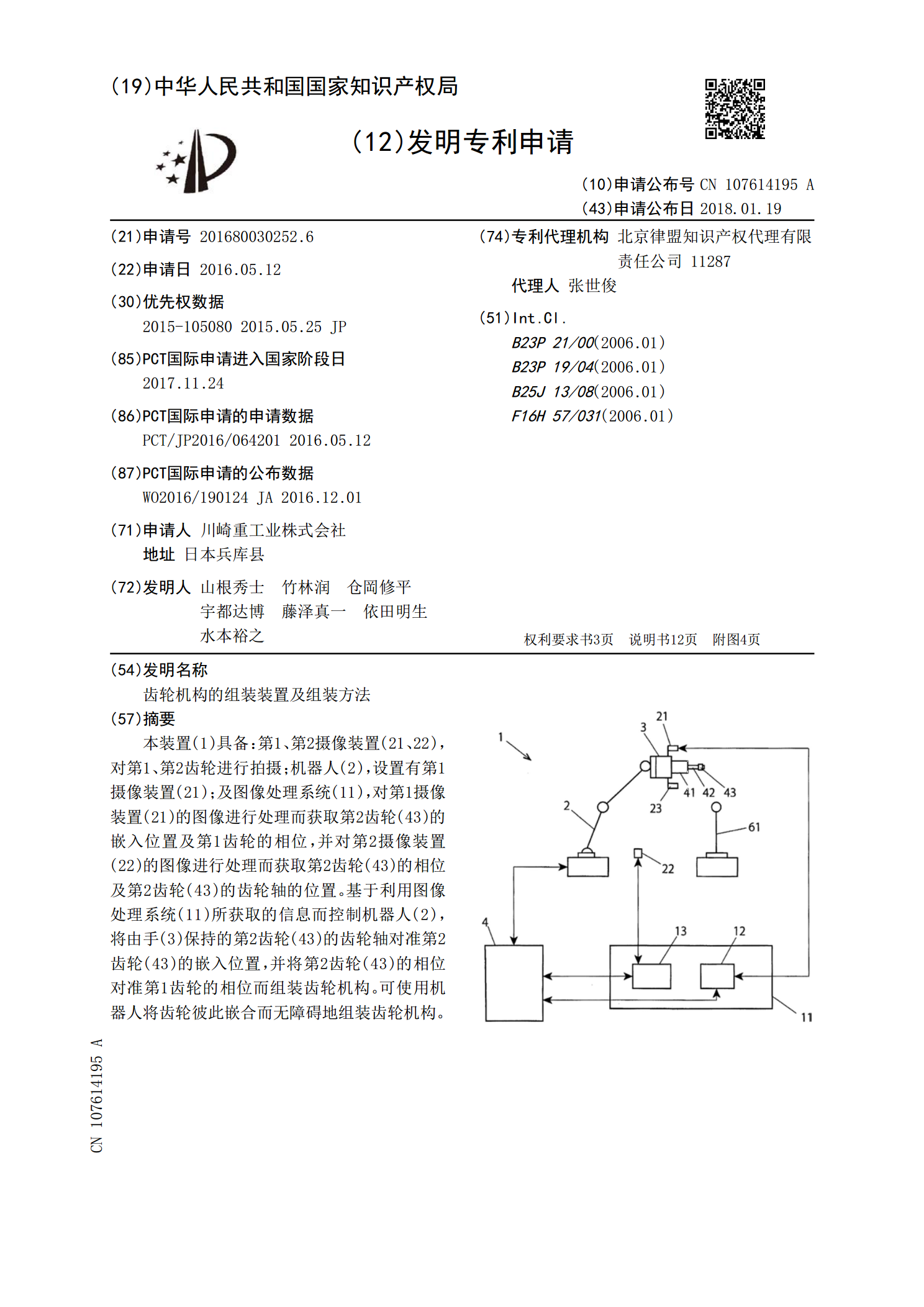
齿轮机构的组装装置及组装方法.pdf
本装置(1)具备:第1、第2摄像装置(21、22),对第1、第2齿轮进行拍摄;机器人(2),设置有第1摄像装置(21);及图像处理系统(11),对第1摄像装置(21)的图像进行处理而获取第2齿轮(43)的嵌入位置及第1齿轮的相位,并对第2摄像装置(22)的图像进行处理而获取第2齿轮(43)的相位及第2齿轮(43)的齿轮轴的位置。基于利用图像处理系统(11)所获取的信息而控制机器人(2),将由手(3)保持的第2齿轮(43)的齿轮轴对准第2齿轮(43)的嵌入位置,并将第2齿轮(43)的相位对准第1齿轮的相位而
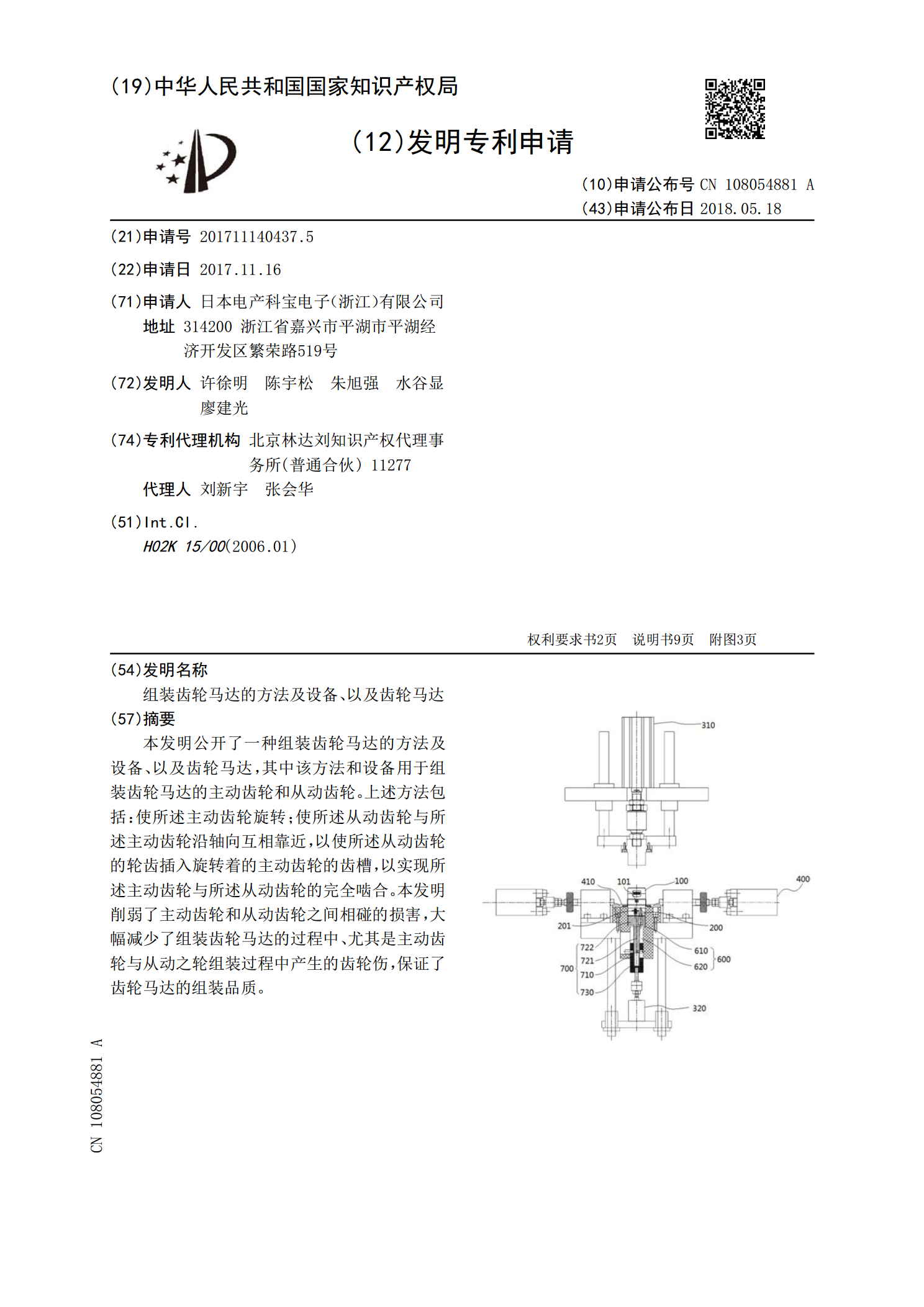
组装齿轮马达的方法及设备、以及齿轮马达.pdf
本发明公开了一种组装齿轮马达的方法及设备、以及齿轮马达,其中该方法和设备用于组装齿轮马达的主动齿轮和从动齿轮。上述方法包括:使所述主动齿轮旋转;使所述从动齿轮与所述主动齿轮沿轴向互相靠近,以使所述从动齿轮的轮齿插入旋转着的主动齿轮的齿槽,以实现所述主动齿轮与所述从动齿轮的完全啮合。本发明削弱了主动齿轮和从动齿轮之间相碰的损害,大幅减少了组装齿轮马达的过程中、尤其是主动齿轮与从动之轮组装过程中产生的齿轮伤,保证了齿轮马达的组装品质。