
锻造操作机钳杆跟随控制研究.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

锻造操作机钳杆跟随控制研究.docx
锻造操作机钳杆跟随控制研究锻造操作机钳杆跟随控制研究摘要:随着工业自动化水平的提高,对于锻造操作机的精确控制要求也越来越高。本论文针对锻造操作机中的钳杆跟随控制问题进行研究,综合运用控制理论和机械力学原理,提出了一种有效的控制算法,可以使得钳杆在控制指令中的轨迹轨迹下精确跟踪。1.引言锻造操作机广泛应用于制造业领域,用于金属材料的加工和成型。在锻造操作机中,钳杆起到了非常重要的作用,负责对工件进行夹持和定位。然而,由于加工工件的特殊性,钳杆在运动过程中需要实现高精度和高速度的跟随控制,这对于提高锻造操作机

锻造操作机钳杆机构的研究的任务书.docx
锻造操作机钳杆机构的研究的任务书任务书一、任务背景锻造操作机床是一种重要的工业生产设备,广泛应用于各个行业。其中,钳杆机构是锻造操作机床中的重要组成部分,它的性能和设计质量直接影响着整个机床的工作效率和生产质量。因此,钳杆机构的研究和发展具有重要的意义。二、任务内容本次任务旨在对锻造操作机钳杆机构进行深入的研究,包括以下内容:1.钳杆机构的构成和工作原理:通过对不同类型的钳杆机构进行分类和比较,深入了解钳杆机构的构造和工作原理,为后续的研究提供基础性的知识。2.钳杆机构的工作特性分析:通过对钳杆机构的力学

大型锻造操作机钳杆轴制造技术研究.docx
大型锻造操作机钳杆轴制造技术研究摘要:随着现代工业的不断发展,大型锻造操作机用于生产重型锻件的必要性越来越大。众所周知,镦锤是大型锻造操作机中的重要部件,而钳杆轴作为镦锤的核心部件,其质量的高低直接决定了整个锻造操作机的生产效率和产品质量。本文依据我国目前大型锻造操作机制造的现状,对钳杆轴制造技术进行研究和探究。关键词:大型锻造操作机、钳杆轴、制造技术一、引言大型锻造操作机被广泛应用于生产各种重型锻件,如机车车轮、船舰轴承、风电轴承等领域。然而,在长时间的使用过程中,大型锻造操作机经常面临着各种各样的问题
一种锻造操作机钳杆机构.pdf
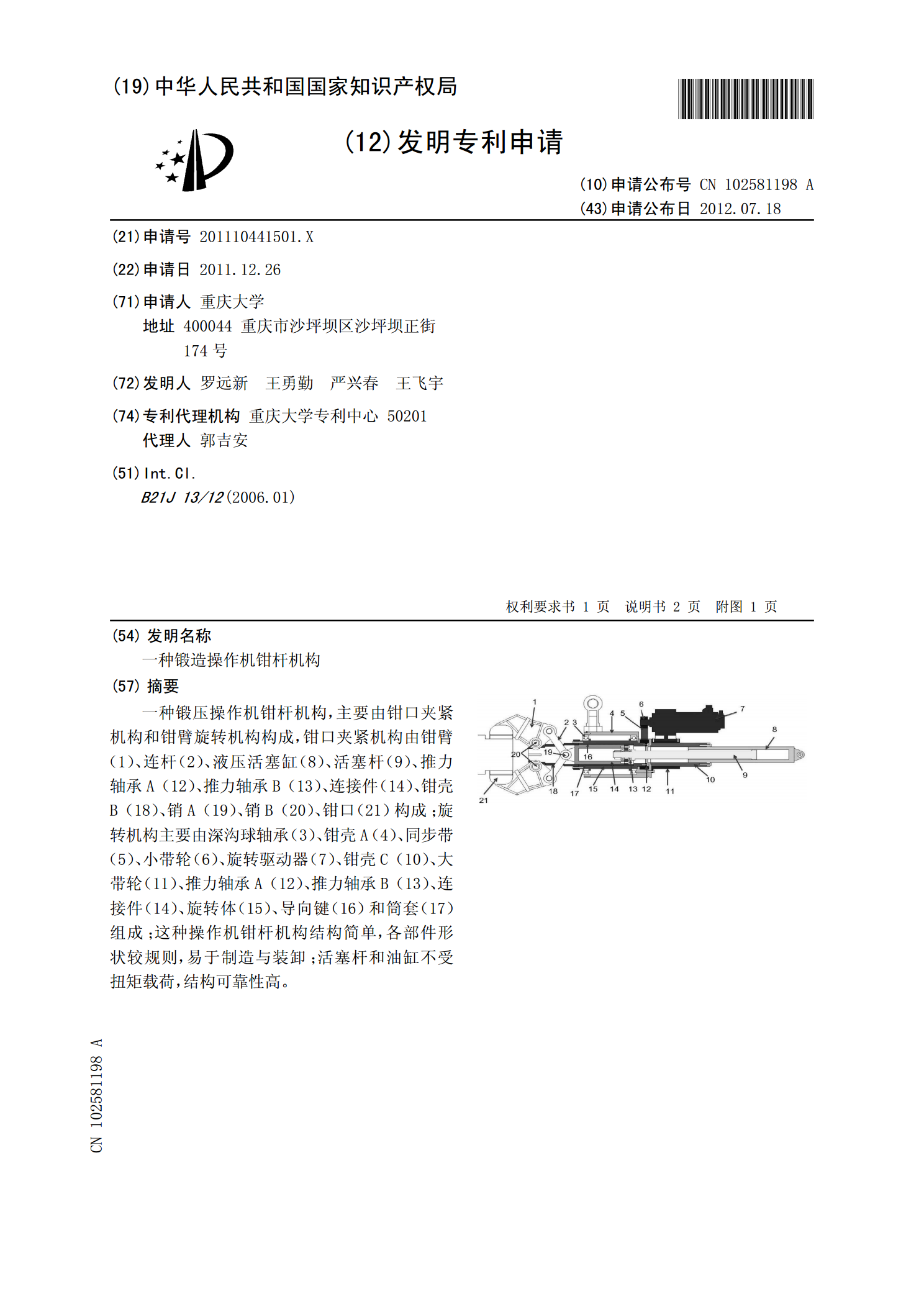
一种锻压操作机钳杆机构,主要由钳口夹紧机构和钳臂旋转机构构成,钳口夹紧机构由钳臂(1)、连杆(2)、液压活塞缸(8)、活塞杆(9)、推力轴承A(12)、推力轴承B(13)、连接件(14)、钳壳B(18)、销A(19)、销B(20)、钳口(21)构成;旋转机构主要由深沟球轴承(3)、钳壳A(4)、同步带(5)、小带轮(6)、旋转驱动器(7)、钳壳C(10)、大带轮(11)、推力轴承A(12)、推力轴承B(13)、连接件(14)、旋转体(15)、导向键(16)和筒套(17)组成;这种操作机钳杆机构结构简单,各

重载锻造操作机钳杆夹持机构优化设计.docx
重载锻造操作机钳杆夹持机构优化设计重载锻造操作中的机钳是一种重要的夹持机构,用于固定和夹持工件,确保在锻造过程中工件的稳定性和安全性。夹持机构的设计优化对于提高操作效率、降低操作风险和保证产品质量具有重要意义。本文旨在探讨重载锻造操作机钳杆夹持机构优化设计的方法和策略。首先,夹持机构的材料选择是优化设计的关键。考虑到机钳夹持机构在重载锻造操作中需要承受高强度和高温的冲击,材料的强度和耐热性是首要考虑因素。常见的材料选择包括高温合金、不锈钢等。此外,夹持机构的材料还需要具备一定的韧性和耐腐蚀性,以确保夹持机