
软体手臂刚度特性分析.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

软体手臂刚度特性分析.docx
软体手臂刚度特性分析软体手臂是一种基于软体技术的新型机械臂,其具有柔性、轻量化、自适应等优点,在工业自动化、医疗保健、服务机器人等领域具有广泛的应用前景。然而,在实际应用中,软体手臂的刚度特性是一个非常重要的问题,关系到其精度、可靠性和稳定性等方面。因此,本文将从软体手臂刚度特性的概念、影响因素、分析方法和优化措施等方面进行探讨。一、软体手臂刚度特性概念软体手臂的刚度是指其在受到外部力矩或负载作用下的变形程度。与传统机械臂不同,软体手臂的变形是由柔性材料和空气等可变形介质组成的,因此具有较高的柔性和韧性,

气动软体机械臂模块变刚度性能分析.docx
气动软体机械臂模块变刚度性能分析气动软体机械臂作为一种新型的机械臂结构,具有灵活性、自适应性和可变刚度性能等优势,在工业生产和服务机器人领域具有广泛的应用前景。本文将围绕气动软体机械臂的变刚度性能展开分析和研究。首先,我们需要明确气动软体机械臂的基本原理。气动软体机械臂主要由柔性结构和气动传动系统构成。柔性结构采用柔软的材料制成,可以通过气动传动系统控制其变形和运动。气动传动系统通过改变气压,控制气囊的膨胀和收缩,从而实现机械臂的运动。由于柔性结构的存在,气动软体机械臂具有可变刚度的特性。气动软体机械臂的

电控空气悬挂刚度特性分析.docx
电控空气悬挂刚度特性分析摘要:本文主要介绍了电控空气悬挂的构造与工作原理,并对其刚度特性进行了分析。电控空气悬挂通过操纵气压调整车辆悬挂系统的刚度,从而提高驾驶舒适性和行驶稳定性。本文分析了电控空气悬挂的刚度变化规律,并讨论了对其进行控制的方法。最后针对电控空气悬挂的应用前景进行了展望。关键词:电控空气悬挂,刚度特性,气压调节,行驶稳定性,驾驶舒适性1.引言悬挂系统在汽车中起着非常重要的作用。它不仅能够保护汽车载人物品的安全,还能够对行驶稳定性和驾驶舒适性产生影响。传统的悬挂系统采用钢板弹簧和减震器组合,

新型微纳测头刚度模型及变刚度特性分析.docx
新型微纳测头刚度模型及变刚度特性分析新型微纳测头刚度模型及变刚度特性分析摘要:微纳测头是微纳技术领域的重要组成部分,其刚度特性对于测量精度和稳定性具有重要影响。通过建立刚度模型和进行变刚度特性分析,可以更加准确地理解微纳测头的运动特性和性能限制。本文基于力学理论,提出了一种新型微纳测头的刚度模型,并对其变刚度特性进行了分析。结果表明,新型微纳测头在不同工作条件下表现出了不同的刚度特性,并提供了一定的理论依据和设计指导。关键词:微纳测头、刚度模型、变刚度特性、力学理论、设计指导1.引言微纳测头作为微纳技术领
系统的液压弹簧刚度和机械负载刚度耦合特性分析.pdf
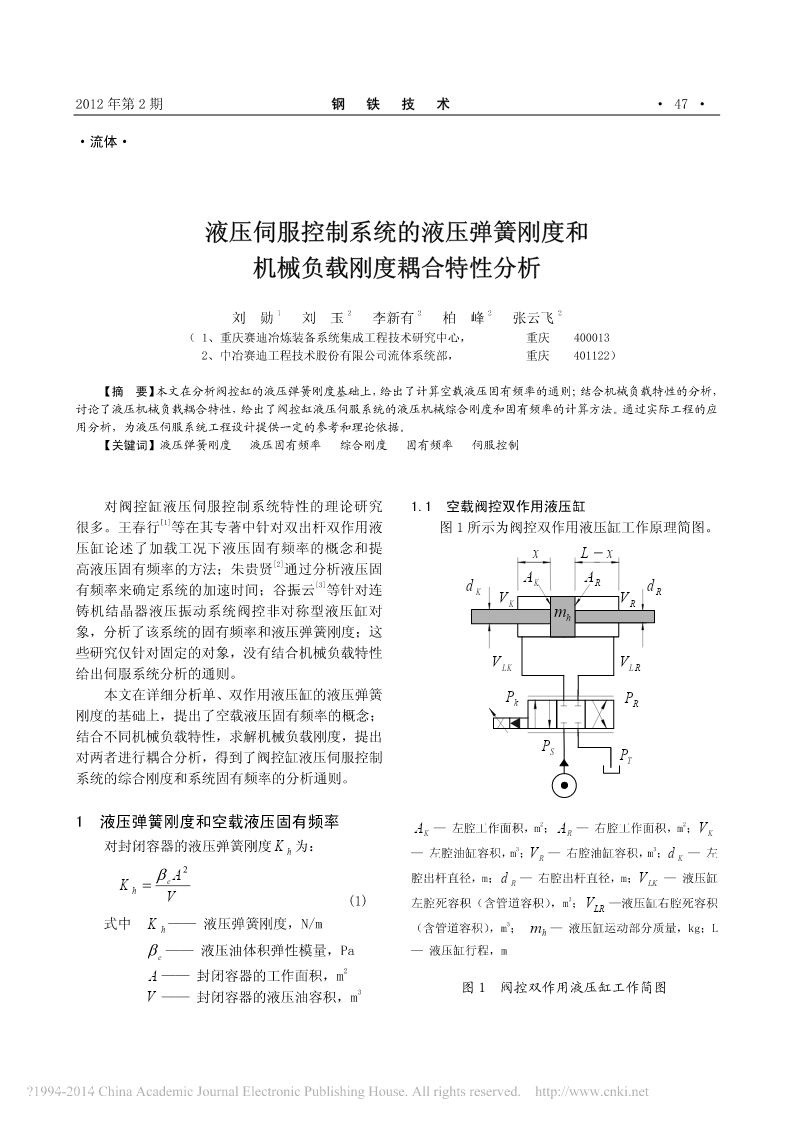
2012年第2期钢铁技术·47··流体·液压伺服控制系统的液压弹簧刚度和机械负载刚度耦合特性分析刘勋1刘玉2李新有2柏峰2张云飞2(1、重庆赛迪冶炼装备系统集成工程技术研究中心,重庆4000132、中冶赛迪工程技术股份有限公司流体系统部,重庆401122)【摘要】本文在分析阀控缸的液压弹簧刚度基础上,给出了计算空载液压固有频率的通则;结合机械负载特性的分析,讨论了液压机械负载耦合特性,给出了阀控缸液压伺服系统的液压机械综合刚度和固有频率的计算方法。通过实际工程的应用分析,为液压伺服系统工程设计提供一定的参