
基于连杆齿轮机构的仿生扑翼飞行器设计.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于连杆齿轮机构的仿生扑翼飞行器设计.docx
基于连杆齿轮机构的仿生扑翼飞行器设计基于连杆齿轮机构的仿生扑翼飞行器设计摘要:本文介绍了一种基于连杆齿轮机构的仿生扑翼飞行器设计。为了模拟鸟类的扑翼运动,采用了连杆齿轮机构来实现扑翼运动。通过分析鸟类的飞行机理和运动特征,设计了一个能够模拟鸟类扑翼的机械臂系统,并通过机械臂上的齿轮传动实现扑翼运动。实验结果显示,该仿生扑翼飞行器能够高效地模拟鸟类的飞行动作,并具有较好的稳定性和机动性。关键词:仿生扑翼飞行器,连杆齿轮机构,鸟类飞行,机械臂系统,传动装置1.引言扑翼飞行器是一种模仿鸟类飞行机理和运动特征的机

仿生扑翼飞行器机构的设计及研究.docx
仿生扑翼飞行器机构的设计及研究近年来,仿生学在机器人领域的应用逐渐受到人们的重视。仿生学是研究自然界生物结构和机理,并将其应用到工程设计中的学科。仿生学的应用不仅可以提高技术的发展水平,还可以推动科学的进步,在机器人领域的应用也会更加广泛。本文以仿生扑翼飞行器机构的设计及研究为主题,将探讨其设计原理、实现过程和应用前景等方面的问题。一、仿生扑翼飞行器的优点仿生扑翼飞行器是一种仿生机器人,它的机构结构和生物的翼膀结构相似,能够进行类似于鸟类的飞行动作。与其他无人机相比,仿生扑翼飞行器的优点在以下几个方面:1
一种基于齿轮副放大机构的微型仿生扑翼飞行器.pdf
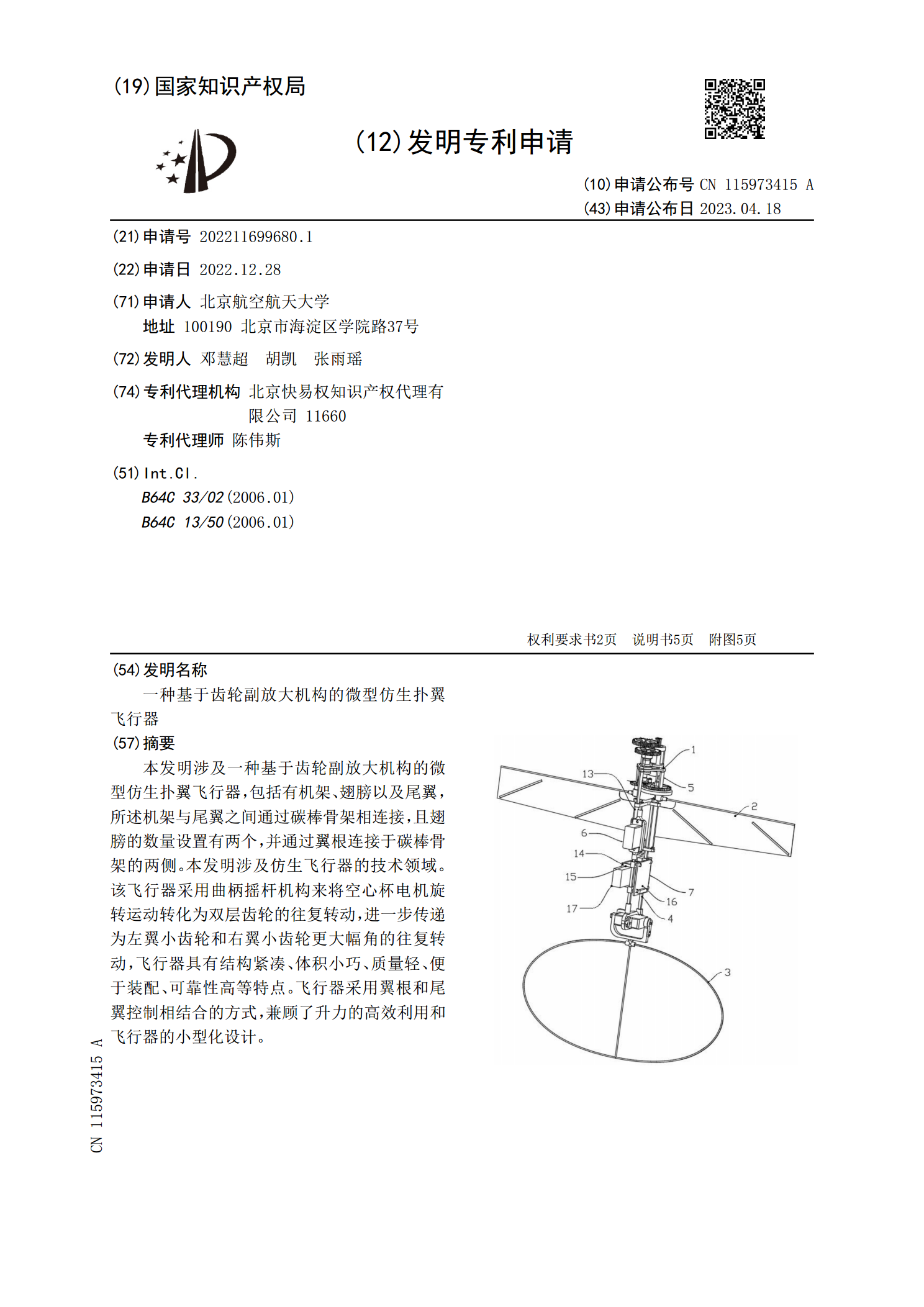
本发明涉及一种基于齿轮副放大机构的微型仿生扑翼飞行器,包括有机架、翅膀以及尾翼,所述机架与尾翼之间通过碳棒骨架相连接,且翅膀的数量设置有两个,并通过翼根连接于碳棒骨架的两侧。本发明涉及仿生飞行器的技术领域。该飞行器采用曲柄摇杆机构来将空心杯电机旋转运动转化为双层齿轮的往复转动,进一步传递为左翼小齿轮和右翼小齿轮更大幅角的往复转动,飞行器具有结构紧凑、体积小巧、质量轻、便于装配、可靠性高等特点。飞行器采用翼根和尾翼控制相结合的方式,兼顾了升力的高效利用和飞行器的小型化设计。
仿生扑翼飞行器.pdf
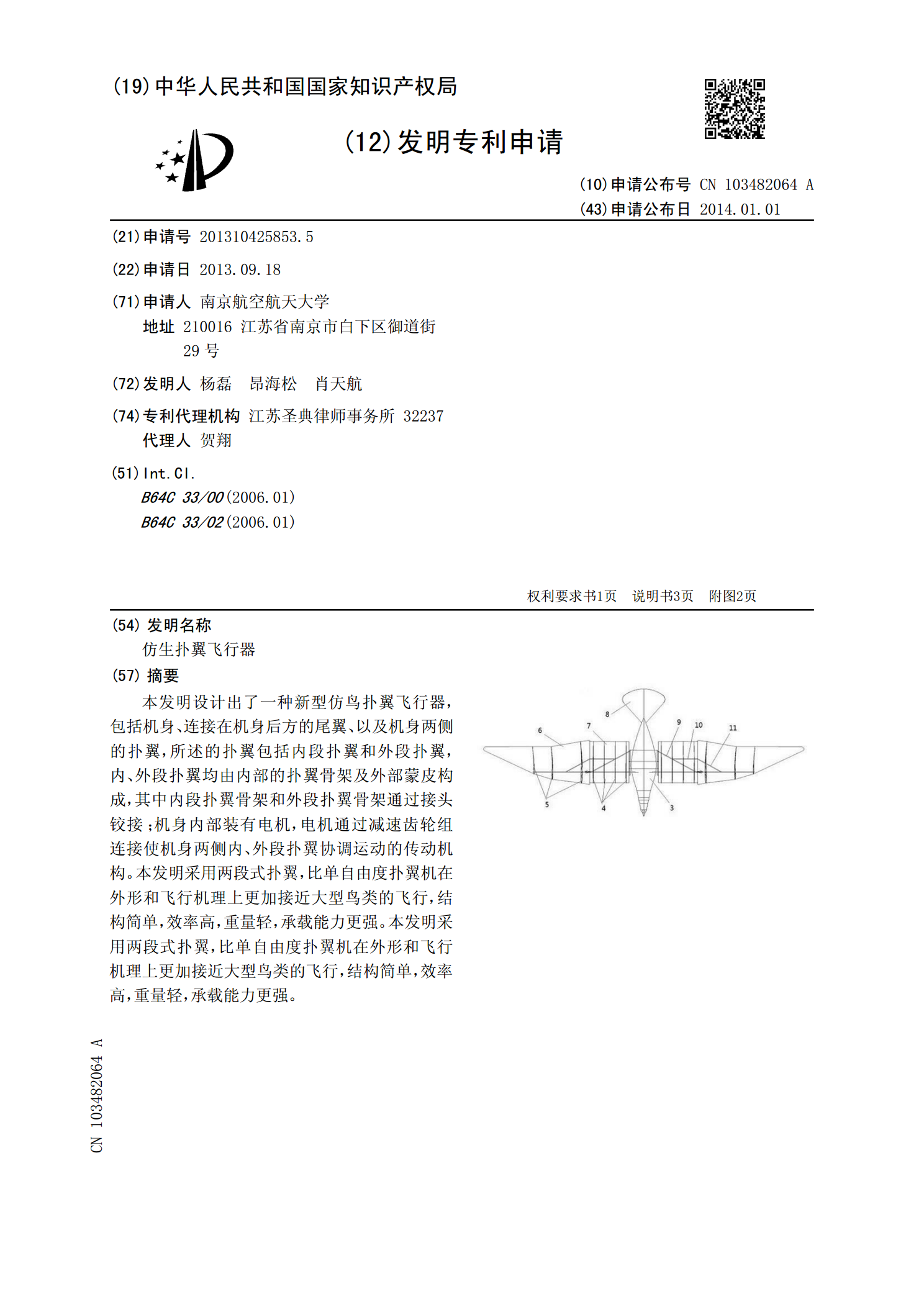
本发明设计出了一种新型仿鸟扑翼飞行器,包括机身、连接在机身后方的尾翼、以及机身两侧的扑翼,所述的扑翼包括内段扑翼和外段扑翼,内、外段扑翼均由内部的扑翼骨架及外部蒙皮构成,其中内段扑翼骨架和外段扑翼骨架通过接头铰接;机身内部装有电机,电机通过减速齿轮组连接使机身两侧内、外段扑翼协调运动的传动机构。本发明采用两段式扑翼,比单自由度扑翼机在外形和飞行机理上更加接近大型鸟类的飞行,结构简单,效率高,重量轻,承载能力更强。本发明采用两段式扑翼,比单自由度扑翼机在外形和飞行机理上更加接近大型鸟类的飞行,结构简单,效率

可折叠仿生扑翼飞行器的设计.docx
可折叠仿生扑翼飞行器的设计折叠仿生扑翼飞行器的设计摘要:仿生学作为一门研究生物学和工程学融合的学科,通过对自然界中生物形态和功能的研究,为工程设计提供了新颖的灵感和解决方案。本论文旨在通过仿生学设计一个可折叠的仿生扑翼飞行器,以提高飞行器在起降、储存和运输过程中的便携性和灵活性。论文首先介绍了仿生学的基本原理和应用领域,并详细研究了不同生物的扑翼运动机制。然后,通过结合仿生学和机械工程的原理,设计了可折叠的仿生扑翼飞行器的结构和运动机制,并进行了模型制作和实验验证。最后,对其性能进行了评估和未来发展的展望