
基于单目悬停相机的定轴慢旋空间非合作目标三维表面重建.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于单目悬停相机的定轴慢旋空间非合作目标三维表面重建.docx
基于单目悬停相机的定轴慢旋空间非合作目标三维表面重建近年来,无人机技术的飞速发展,使得无人机在各个领域得到了广泛的应用,例如,安防、环境监测、消防、农业等行业。其中,无人机在空间目标重建方面受到了越来越多的关注。本文将针对单目悬停相机的定轴慢旋空间非合作目标三维表面重建进行研究。一、研究背景在无人机的任务中,将目标从空中拍摄下来进行图像处理,提取出目标的特征信息是必不可少的环节。然而,由于无人机在飞行过程中具有很高的灵活性,造成了拍摄时的摄像机姿态的多样性,这对于空间目标的三维建模是极大的挑战。因此,如何

基于单目相机的空间非合作目标姿态测量(英文).docx
基于单目相机的空间非合作目标姿态测量(英文)IntroductionAttitudeestimationofspaceobjectsisanimportanttaskinthefieldofrobotics,spaceexploration,anddefense.Itisusedtodeterminetheorientationofatargetinspace,whichiscrucialinvariousapplicationssuchasdocking,landing,andreconnoiterin
基于单目相机重建的虚实融合渲染方法及装置.pdf
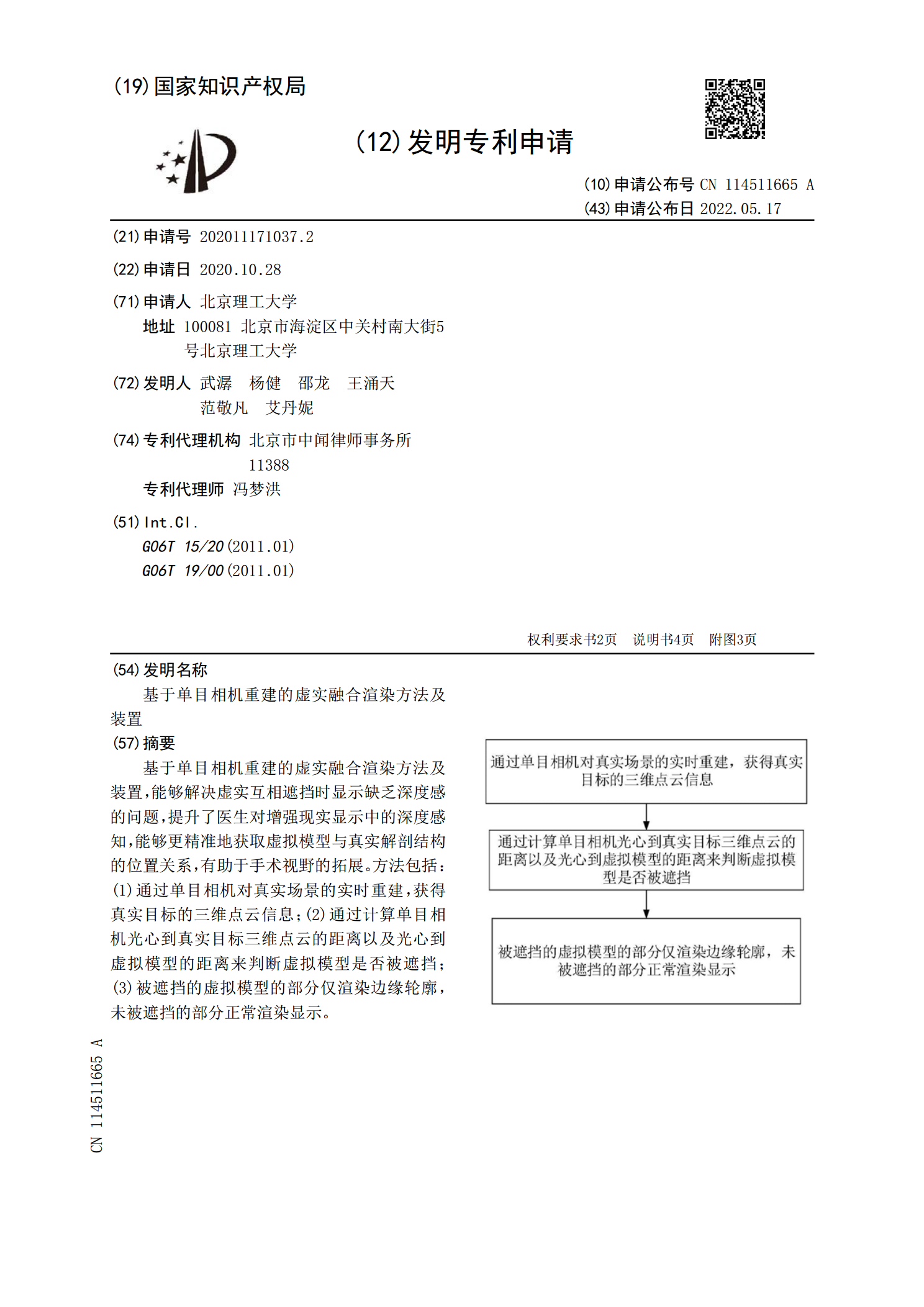
基于单目相机重建的虚实融合渲染方法及装置,能够解决虚实互相遮挡时显示缺乏深度感的问题,提升了医生对增强现实显示中的深度感知,能够更精准地获取虚拟模型与真实解剖结构的位置关系,有助于手术视野的拓展。方法包括:(1)通过单目相机对真实场景的实时重建,获得真实目标的三维点云信息;(2)通过计算单目相机光心到真实目标三维点云的距离以及光心到虚拟模型的距离来判断虚拟模型是否被遮挡;(3)被遮挡的虚拟模型的部分仅渲染边缘轮廓,未被遮挡的部分正常渲染显示。
一种基于单目相机的透视投影下三维人脸重建方法.pdf
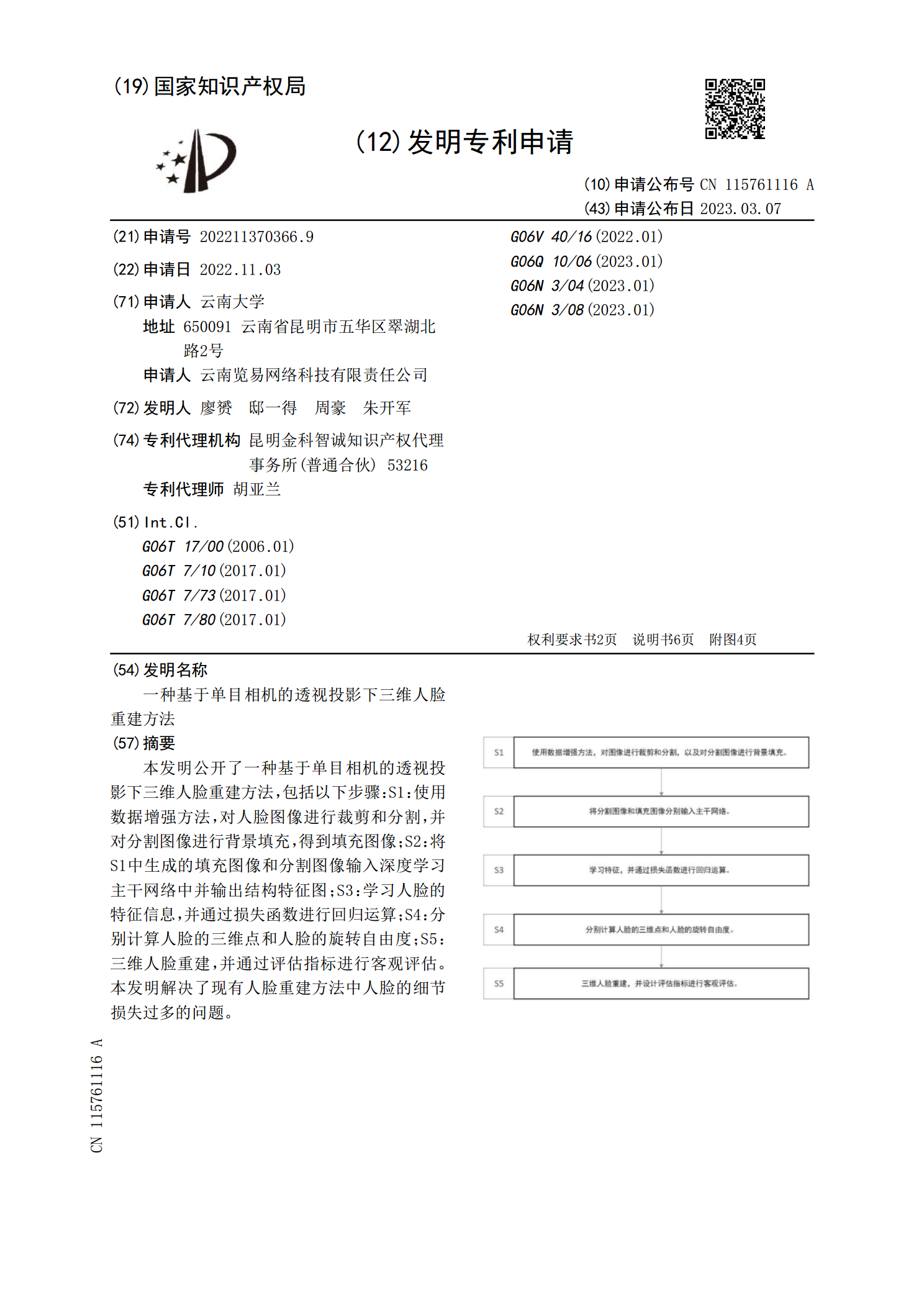
本发明公开了一种基于单目相机的透视投影下三维人脸重建方法,包括以下步骤:S1:使用数据增强方法,对人脸图像进行裁剪和分割,并对分割图像进行背景填充,得到填充图像;S2:将S1中生成的填充图像和分割图像输入深度学习主干网络中并输出结构特征图;S3:学习人脸的特征信息,并通过损失函数进行回归运算;S4:分别计算人脸的三维点和人脸的旋转自由度;S5:三维人脸重建,并通过评估指标进行客观评估。本发明解决了现有人脸重建方法中人脸的细节损失过多的问题。

基于回归方法的单目相机人脸重建研究的开题报告.docx
基于回归方法的单目相机人脸重建研究的开题报告一、选题背景人脸影像处理在计算机视觉领域有着重要的研究价值。人脸重建是其中的一个重要研究内容。现有的人脸重建方法主要有三种:1)基于三维人脸扫描的重建方法;2)基于多视角相机的重建方法;3)基于单目相机的重建方法。基于单目相机的人脸重建方法具有成本低,难度小,应用范围广等优点。同时,单目相机也是人机交互和虚拟现实应用极为常见的成像设备,因此该方法的研究与应用具有广泛的现实意义。本文旨在探究基于回归方法的单目相机人脸重建研究,使用深度学习基于卷积神经网络的人脸重建