
基于多模态感知的盲人避障辅助技术研究与应用.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于多模态感知的盲人避障辅助技术研究与应用.docx
基于多模态感知的盲人避障辅助技术研究与应用基于多模态感知的盲人避障辅助技术研究与应用摘要:盲人在行走时面临着诸多困难和危险,盲人避障辅助技术的研究和应用具有重要意义。本文基于多模态感知的盲人避障辅助技术进行了深入研究,并提出了一种基于视觉、听觉和触觉多模态感知的盲人避障辅助系统。实验结果表明,该系统能够有效帮助盲人识别障碍物,提高盲人行走的安全性和便利性。1.引言盲人作为一类特殊人群,而生活中遇到的种种困难和危险让他们的生活质量大大降低。盲人避障辅助技术的研究和应用对于帮助盲人更好地适应社会环境具有重要意

基于RGB--D视觉信息的盲人避障技术研究.docx
基于RGB--D视觉信息的盲人避障技术研究随着现代科技的不断发展,机器视觉技术已经成为了人们越来越关注的领域。在机器视觉技术应用的众多领域中,盲人避障成为了一个备受关注的问题,因为盲人在日常生活和交通中存在着很大的安全隐患。因此,基于RGB-D视觉信息的盲人避障技术的研究具有重要的现实意义和应用前景。一、RGB-D视觉信息的基本概念RGB-D视觉信息指的是以颜色空间和深度空间为基础的图像信息。在RGB(Red、Green、Blue)颜色空间中,每个像素的颜色信息可以通过三个分量进行描述。而在深度空间中,可

基于模糊控制的盲人避障系统设计.docx
基于模糊控制的盲人避障系统设计基于模糊控制的盲人避障系统设计摘要随着盲人社会参与的增加,安全问题愈发突出。为了提高盲人在日常生活中的自主性和安全性,本论文提出了一种基于模糊控制的盲人避障系统。该系统利用超声波传感器获取周围环境信息,并通过模糊控制算法实现路径规划和障碍物避让。实验结果表明,该系统能够可靠地帮助盲人避开障碍物,提高盲人的行动安全性。1.引言盲人在日常生活中常常面临着障碍物避让的困难,这使得他们的行动安全受到很大的威胁。因此,研发一种能够帮助盲人避开障碍物的系统显得尤为重要。本论文提出了一种基
一种基于多雷达感知的无人船避障方法.pdf
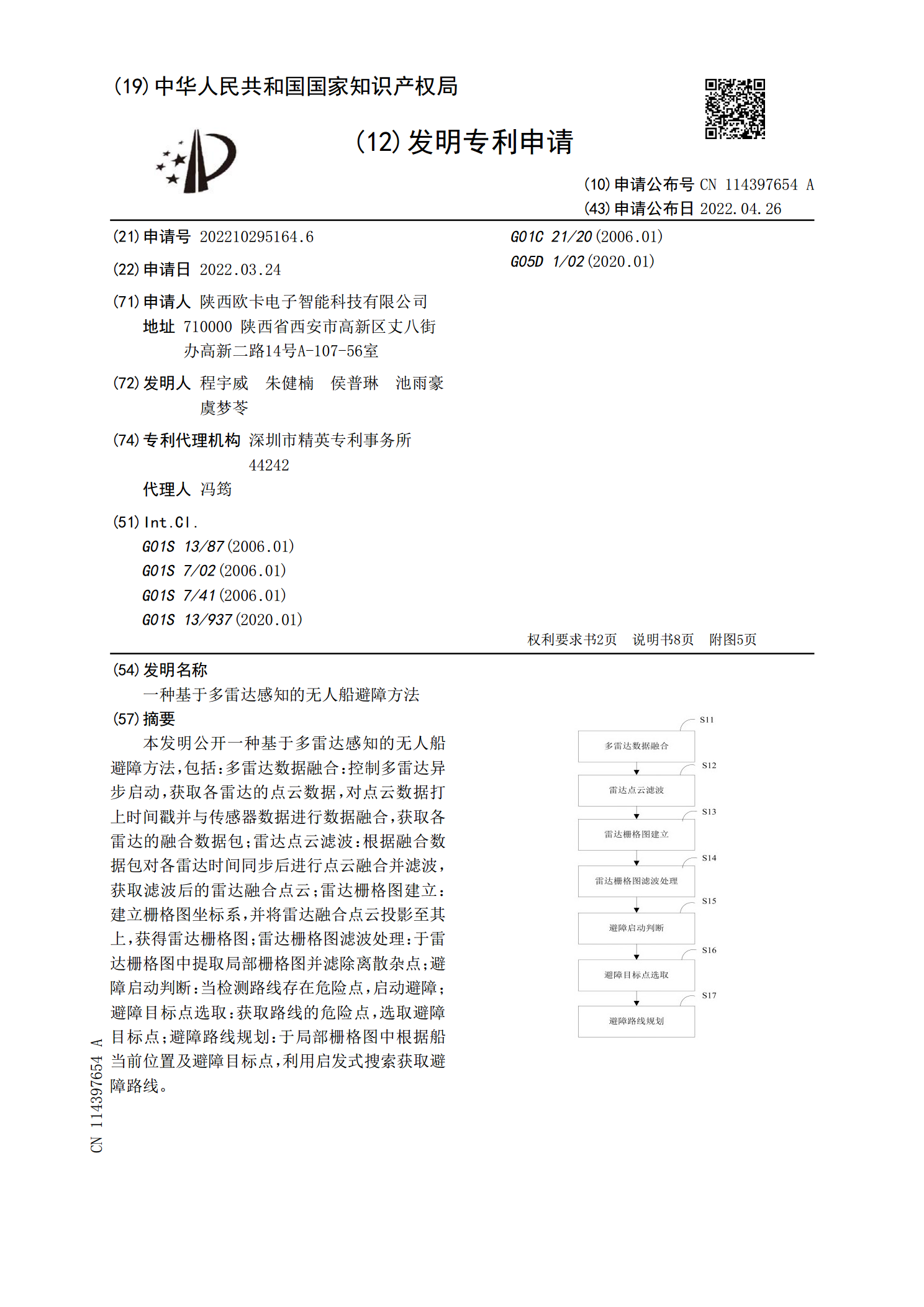
本发明公开一种基于多雷达感知的无人船避障方法,包括:多雷达数据融合:控制多雷达异步启动,获取各雷达的点云数据,对点云数据打上时间戳并与传感器数据进行数据融合,获取各雷达的融合数据包;雷达点云滤波:根据融合数据包对各雷达时间同步后进行点云融合并滤波,获取滤波后的雷达融合点云;雷达栅格图建立:建立栅格图坐标系,并将雷达融合点云投影至其上,获得雷达栅格图;雷达栅格图滤波处理:于雷达栅格图中提取局部栅格图并滤除离散杂点;避障启动判断:当检测路线存在危险点,启动避障;避障目标点选取:获取路线的危险点,选取避障目标点

基于单片机的盲人避障装置的设计.docx
基于单片机的盲人避障装置的设计基于单片机的盲人避障装置的设计摘要:盲人作为特殊群体,在日常生活中面临着许多困难和挑战。为了提高盲人的日常生活质量和安全感,本论文设计了一种基于单片机的盲人避障装置。该装置通过利用单片机的多种功能,结合超声波传感器和语音模块完成对盲人的环境感知和语音提示。实验结果表明,该装置能够有效地帮助盲人避免障碍物,提高盲人的行动能力和安全性。关键词:盲人,避障装置,单片机,超声波传感器,语音模块引言:盲人是社会中一群特殊的人群,他们由于视力受限,生活中面临诸多困难和危险。为了提高盲人的