
基于无人机影像匹配点云的苗圃单木冠层三维分割.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于无人机影像匹配点云的苗圃单木冠层三维分割.docx
基于无人机影像匹配点云的苗圃单木冠层三维分割标题:基于无人机影像匹配点云的苗圃单木冠层三维分割摘要:随着无人机技术的发展,无人机影像匹配点云成为获取三维地理信息的重要方法之一。苗圃是重要的绿化产业基地,单木冠层的三维分割对于苗圃管理、病虫害监测和植物遗传研究具有重要意义。本文基于无人机影像匹配点云数据,探讨了苗圃单木冠层三维分割的方法与技术,并提出了一种综合应用的解决方案。引言:苗圃是培育种子和育苗,创造植物产品的重要场所,其管理对于绿化产业的发展至关重要。传统的苗圃管理方法依赖于人工勘察和数据录入,耗时

基于三维形状匹配的点云分割.pptx
汇报人:目录PARTONEPARTTWO形状匹配技术概述三维形状匹配的原理常见的三维形状匹配算法三维形状匹配技术的应用场景PARTTHREE点云分割技术概述点云分割的原理常见的点云分割算法点云分割技术的应用场景PARTFOUR基于三维形状匹配的点云分割原理基于三维形状匹配的点云分割算法流程基于三维形状匹配的点云分割的优势与局限性基于三维形状匹配的点云分割的应用前景PARTFIVE数据预处理技术特征提取技术匹配算法优化技术分割算法优化技术PARTSIX实验设置与数据集介绍实验过程与结果展示结果分析方法与评价

无人机影像匹配点云滤波处理与三维重建.docx
无人机影像匹配点云滤波处理与三维重建随着无人机技术的发展,越来越多的应用场景中需要使用无人机获取现场数据,其中包括三维重建。而无人机获取的数据中噪声、误差等问题也需要在数据处理过程中加以处理。本文将介绍无人机影像匹配点云滤波处理与三维重建的相关内容。首先介绍点云滤波的常用方法,包括高斯滤波、中值滤波、基于法线的滤波等;然后讲解影像匹配的方法,包括特征点提取、特征匹配等;最后介绍三维重建的流程和常用软件,包括Pix4Dmapper、AgisoftMetashape等。一、点云滤波方法介绍点云数据是由无人机搭
一种基于树冠三维点云分布的单木分割方法.pdf
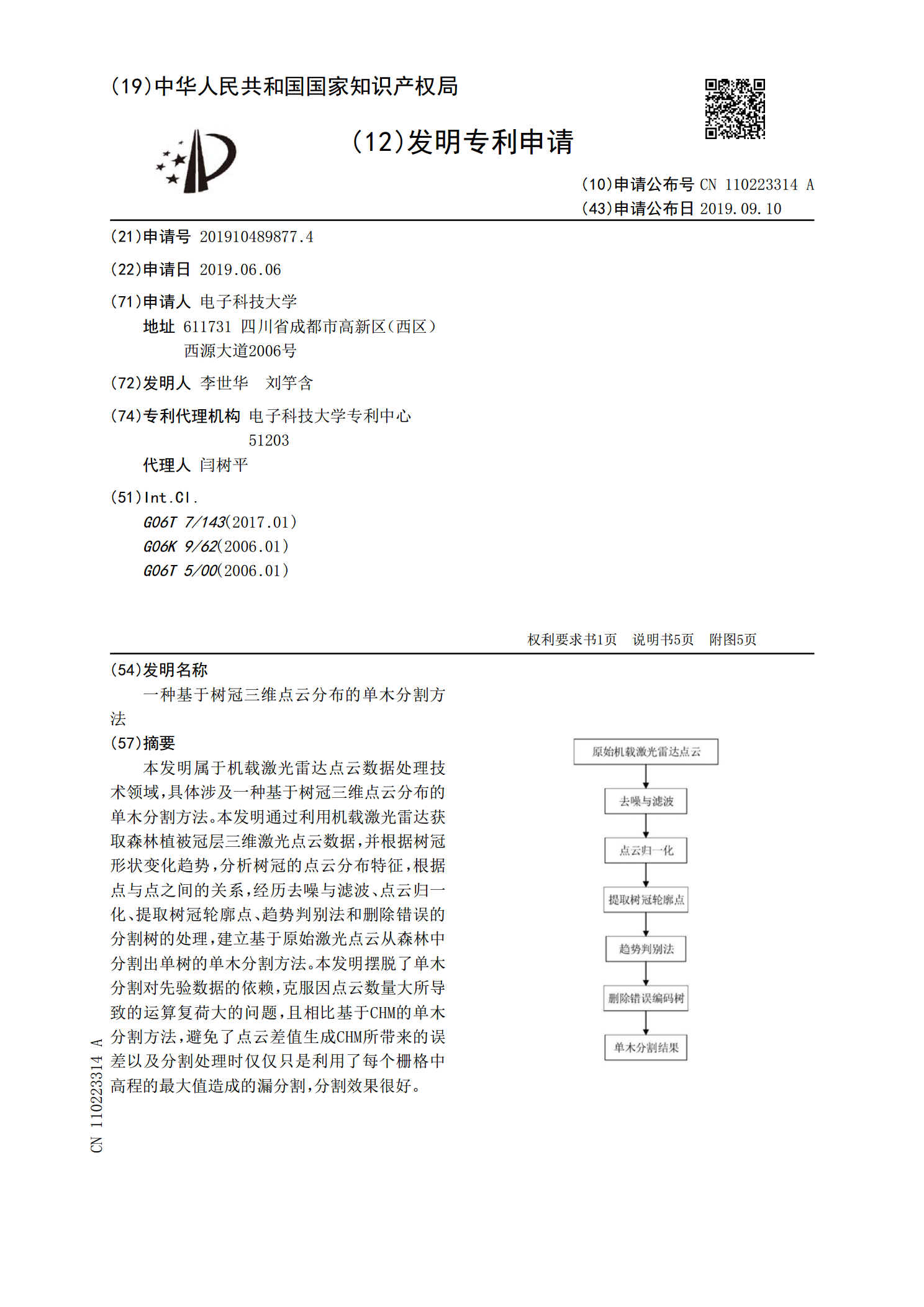
本发明属于机载激光雷达点云数据处理技术领域,具体涉及一种基于树冠三维点云分布的单木分割方法。本发明通过利用机载激光雷达获取森林植被冠层三维激光点云数据,并根据树冠形状变化趋势,分析树冠的点云分布特征,根据点与点之间的关系,经历去噪与滤波、点云归一化、提取树冠轮廓点、趋势判别法和删除错误的分割树的处理,建立基于原始激光点云从森林中分割出单树的单木分割方法。本发明摆脱了单木分割对先验数据的依赖,克服因点云数量大所导致的运算复荷大的问题,且相比基于CHM的单木分割方法,避免了点云差值生成CHM所带来的误差以及分
一种基于无人机Lidar点云数据的果树单木分割方法.pdf
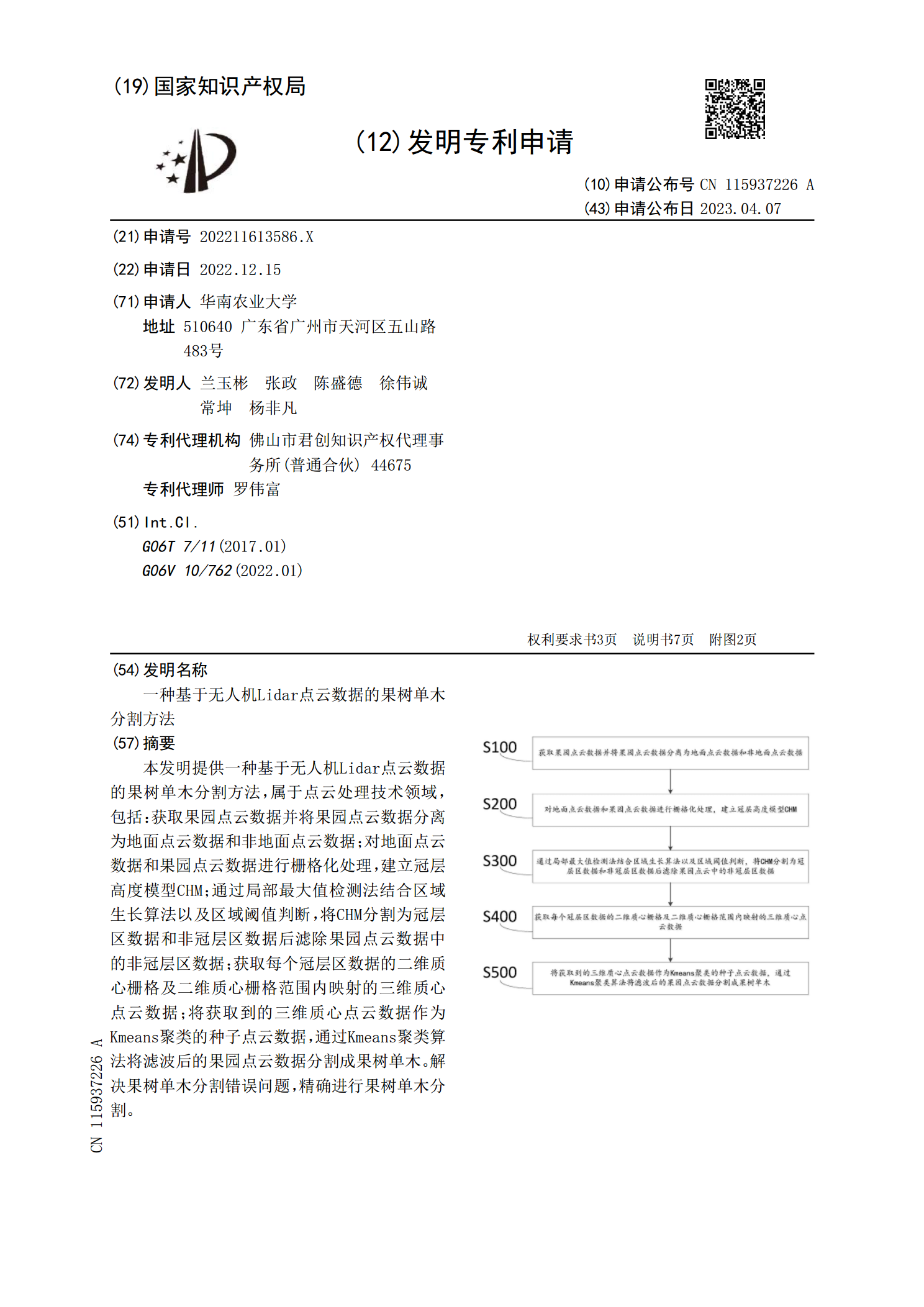
本发明提供一种基于无人机Lidar点云数据的果树单木分割方法,属于点云处理技术领域,包括:获取果园点云数据并将果园点云数据分离为地面点云数据和非地面点云数据;对地面点云数据和果园点云数据进行栅格化处理,建立冠层高度模型CHM;通过局部最大值检测法结合区域生长算法以及区域阈值判断,将CHM分割为冠层区数据和非冠层区数据后滤除果园点云数据中的非冠层区数据;获取每个冠层区数据的二维质心栅格及二维质心栅格范围内映射的三维质心点云数据;将获取到的三维质心点云数据作为Kmeans聚类的种子点云数据,通过Kmeans聚