
一种基于树冠三维点云分布的单木分割方法.pdf

一吃****福乾

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于树冠三维点云分布的单木分割方法.pdf
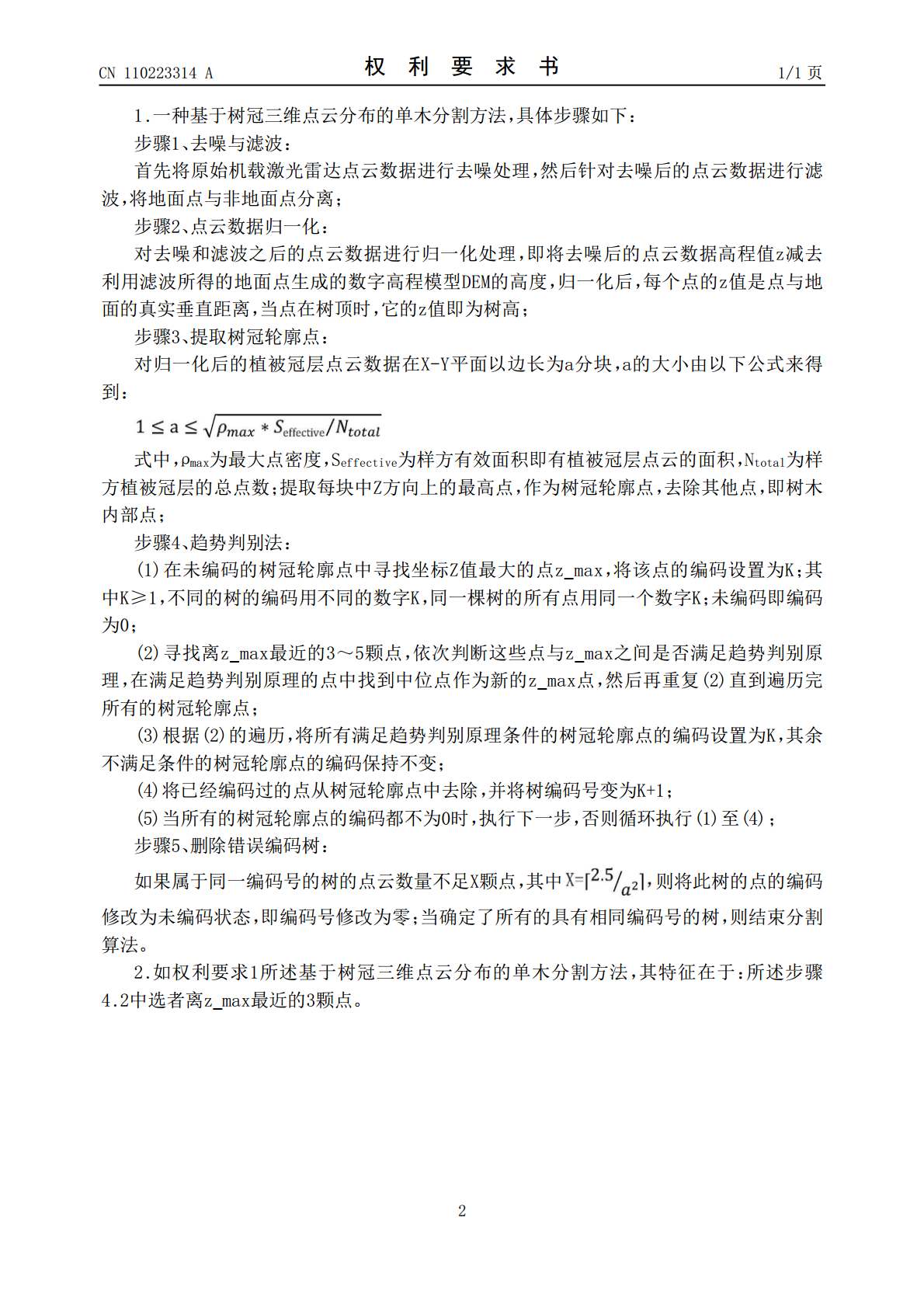
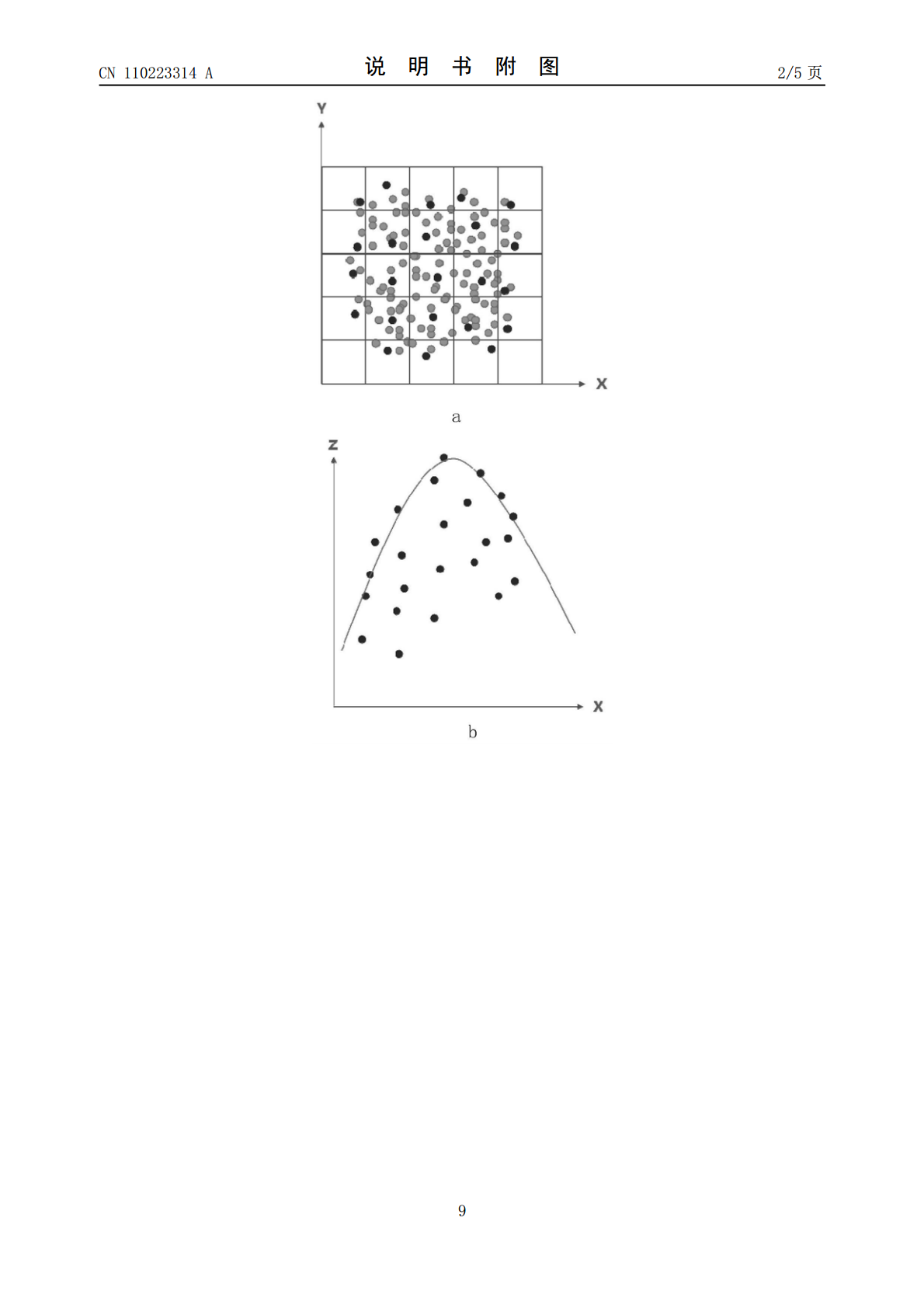
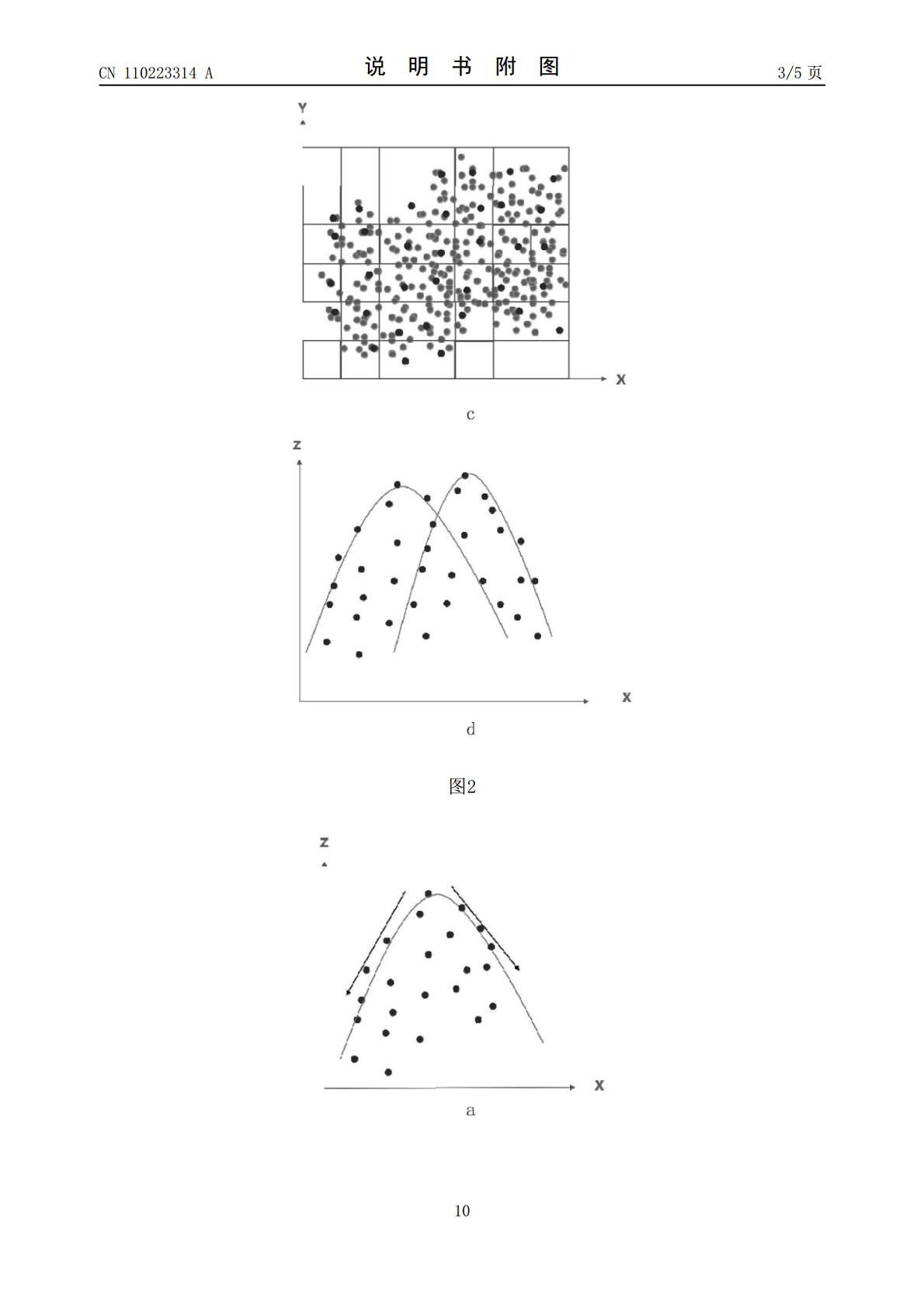
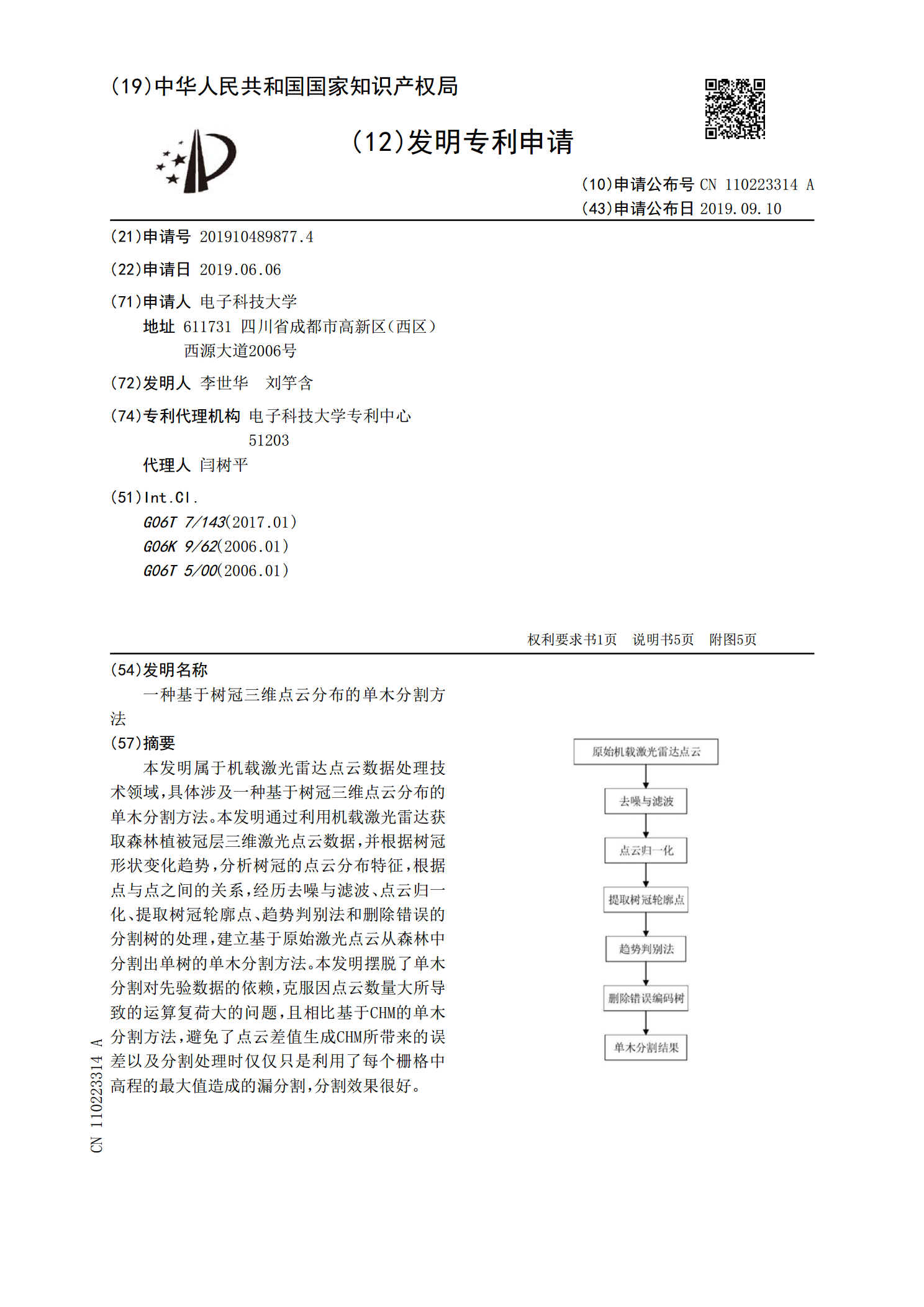
本发明属于机载激光雷达点云数据处理技术领域,具体涉及一种基于树冠三维点云分布的单木分割方法。本发明通过利用机载激光雷达获取森林植被冠层三维激光点云数据,并根据树冠形状变化趋势,分析树冠的点云分布特征,根据点与点之间的关系,经历去噪与滤波、点云归一化、提取树冠轮廓点、趋势判别法和删除错误的分割树的处理,建立基于原始激光点云从森林中分割出单树的单木分割方法。本发明摆脱了单木分割对先验数据的依赖,克服因点云数量大所导致的运算复荷大的问题,且相比基于CHM的单木分割方法,避免了点云差值生成CHM所带来的误差以及分
一种自下而上的点云单木分割方法及系统.pdf
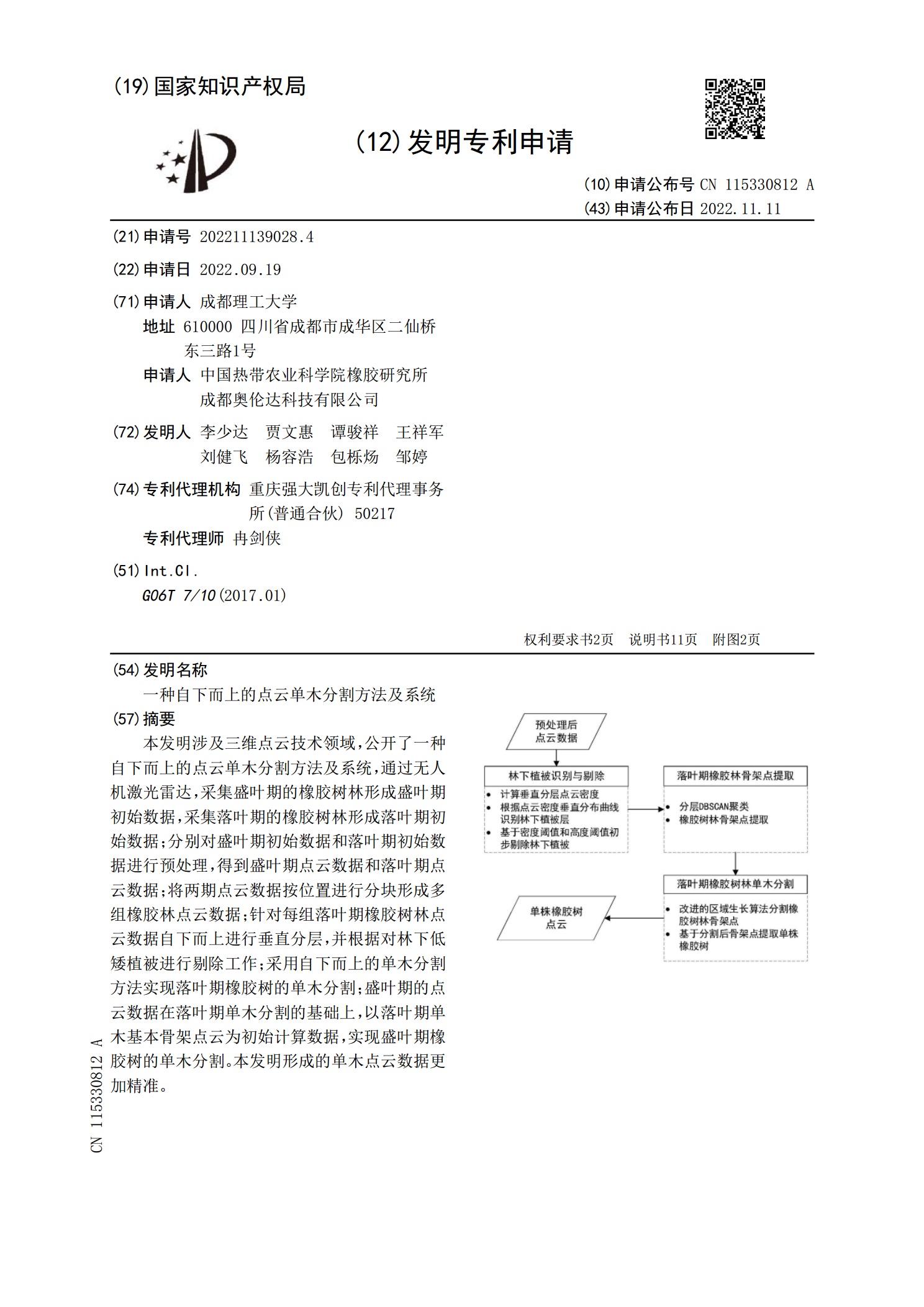
本发明涉及三维点云技术领域,公开了一种自下而上的点云单木分割方法及系统,通过无人机激光雷达,采集盛叶期的橡胶树林形成盛叶期初始数据,采集落叶期的橡胶树林形成落叶期初始数据;分别对盛叶期初始数据和落叶期初始数据进行预处理,得到盛叶期点云数据和落叶期点云数据;将两期点云数据按位置进行分块形成多组橡胶林点云数据;针对每组落叶期橡胶树林点云数据自下而上进行垂直分层,并根据对林下低矮植被进行剔除工作;采用自下而上的单木分割方法实现落叶期橡胶树的单木分割;盛叶期的点云数据在落叶期单木分割的基础上,以落叶期单木基本骨架

基于深度学习与机载激光点云的单株树冠分割方法.pdf
本发明公开一种基于深度学习与机载激光点云的单株树冠分割方法,包括获取研究场地的点云数据;将去噪后的点云数据分为地上点和地面点;提取地上点中单株树木点云,将不同树木划分在不同的体素内;构造训练样本数据集;对PointNet深度神经网络开展训练;将待测场地的地上点通过体素化的方法细分为多个体素,将体素内点云数据转换为PointNet所需格式后,输入到训练好的PointNet模型内,识别出树的每个体素中的点云;将每个体素DSM的梯度信息结合惯性动量梯度的方法定位树冠的边界点,根据边界点勾勒出分割的树冠。本发明在
一种基于无人机Lidar点云数据的果树单木分割方法.pdf
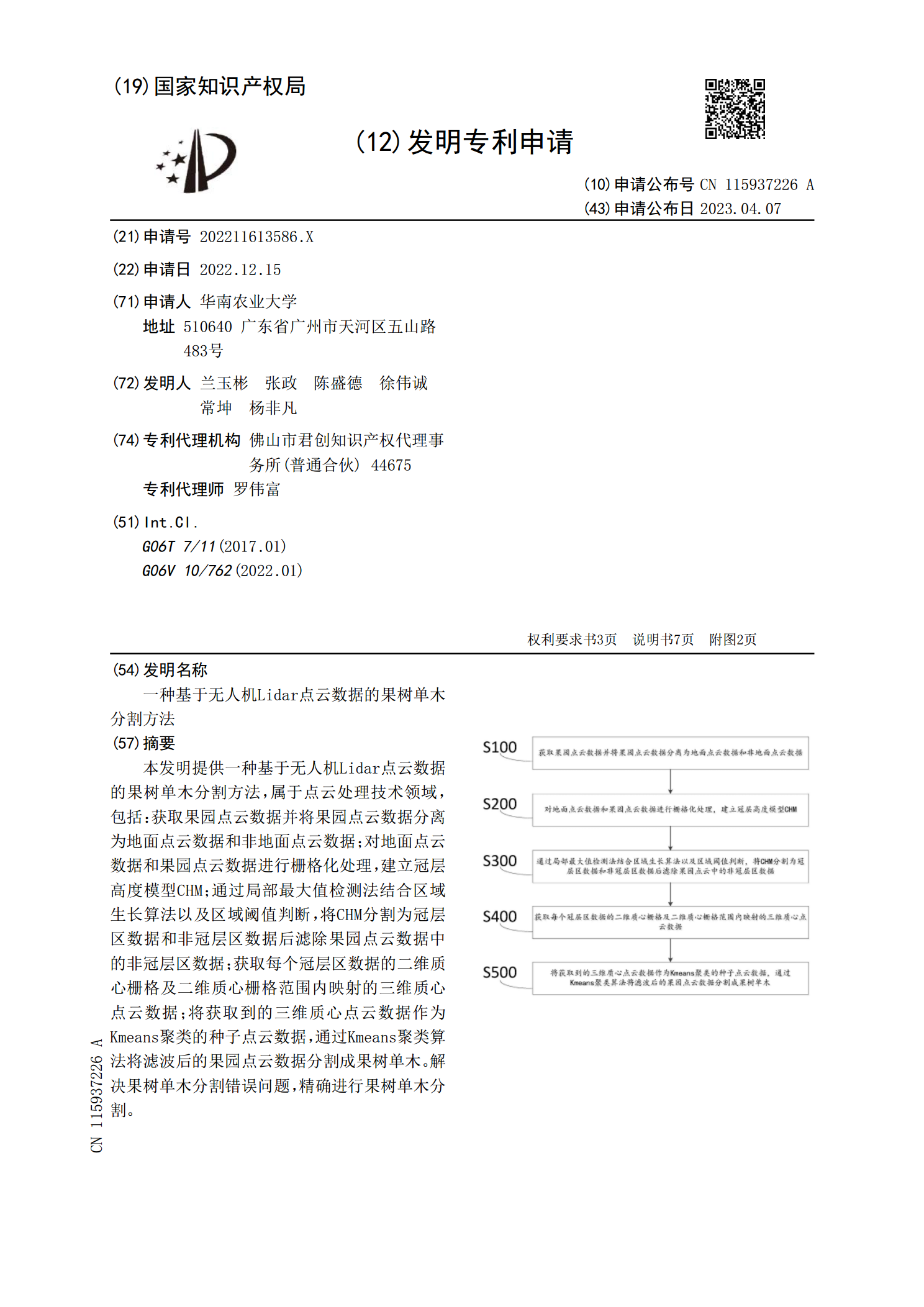
本发明提供一种基于无人机Lidar点云数据的果树单木分割方法,属于点云处理技术领域,包括:获取果园点云数据并将果园点云数据分离为地面点云数据和非地面点云数据;对地面点云数据和果园点云数据进行栅格化处理,建立冠层高度模型CHM;通过局部最大值检测法结合区域生长算法以及区域阈值判断,将CHM分割为冠层区数据和非冠层区数据后滤除果园点云数据中的非冠层区数据;获取每个冠层区数据的二维质心栅格及二维质心栅格范围内映射的三维质心点云数据;将获取到的三维质心点云数据作为Kmeans聚类的种子点云数据,通过Kmeans聚

基于三维点云的苹果树冠层光照分布模型研究.docx
基于三维点云的苹果树冠层光照分布模型研究基于三维点云的苹果树冠层光照分布模型研究摘要:随着对果树生长环境的研究深入,光照分布对果树生长和产量的影响日益引起关注。本研究基于三维点云技术,以苹果树为研究对象,建立了一个苹果树冠层光照分布模型。通过采集苹果树冠层的三维点云数据,并结合光学模拟和统计分析方法,研究了光照强度在树冠内的分布规律,为果树的管理决策提供了科学依据。关键词:三维点云,苹果树,光照分布,模型,果树管理引言:果树生长环境中的光照条件是影响果实品质和产量的重要因素之一。光照不足会导致果实的生理功