
基于H2指标的惯容阻尼系统优化设计.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于H2指标的惯容阻尼系统优化设计.docx
基于H2指标的惯容阻尼系统优化设计基于H2指标的惯容阻尼系统优化设计摘要惯容阻尼系统在许多工程领域中起着重要的作用,如机械系统、电动机、控制系统等。为了提高系统的性能和稳定性,优化设计是必不可少的一步。本文将介绍一种基于H2指标的惯容阻尼系统优化设计方法,该方法通过最小化系统的H2范数来实现系统性能和稳定性的优化。通过实例分析,验证了该方法的有效性。引言惯容阻尼系统是一种常见的线性时不变系统,具有良好的性能和稳定性。然而,在实际应用中,由于外界环境的影响和内部参数的变化,系统性能和稳定性可能会下降。因此,

基于惯容-弹簧-阻尼的结构减振研究.docx
基于惯容-弹簧-阻尼的结构减振研究基于惯容-弹簧-阻尼的结构减振研究摘要随着现代建筑高度的逐步提高和建筑物振动问题的日益凸显,结构减振技术已成为难点研究之一。惯容-弹簧-阻尼系统是一种常见的结构减振方案。本文首先介绍惯容-弹簧-阻尼系统的结构原理,然后分析了其作用机理及其在实际工程中的应用情况,并展望了未来的发展方向。关键词:惯容-弹簧-阻尼,结构减振,阻尼比,振动特性I.简介现代建筑由于高度较高、风压和地震力较大,在使用过程中容易出现明显的振动,往往需要采用结构减振技术来降低振动对建筑及其使用者所造成的
变惯容变阻尼减振器.pdf
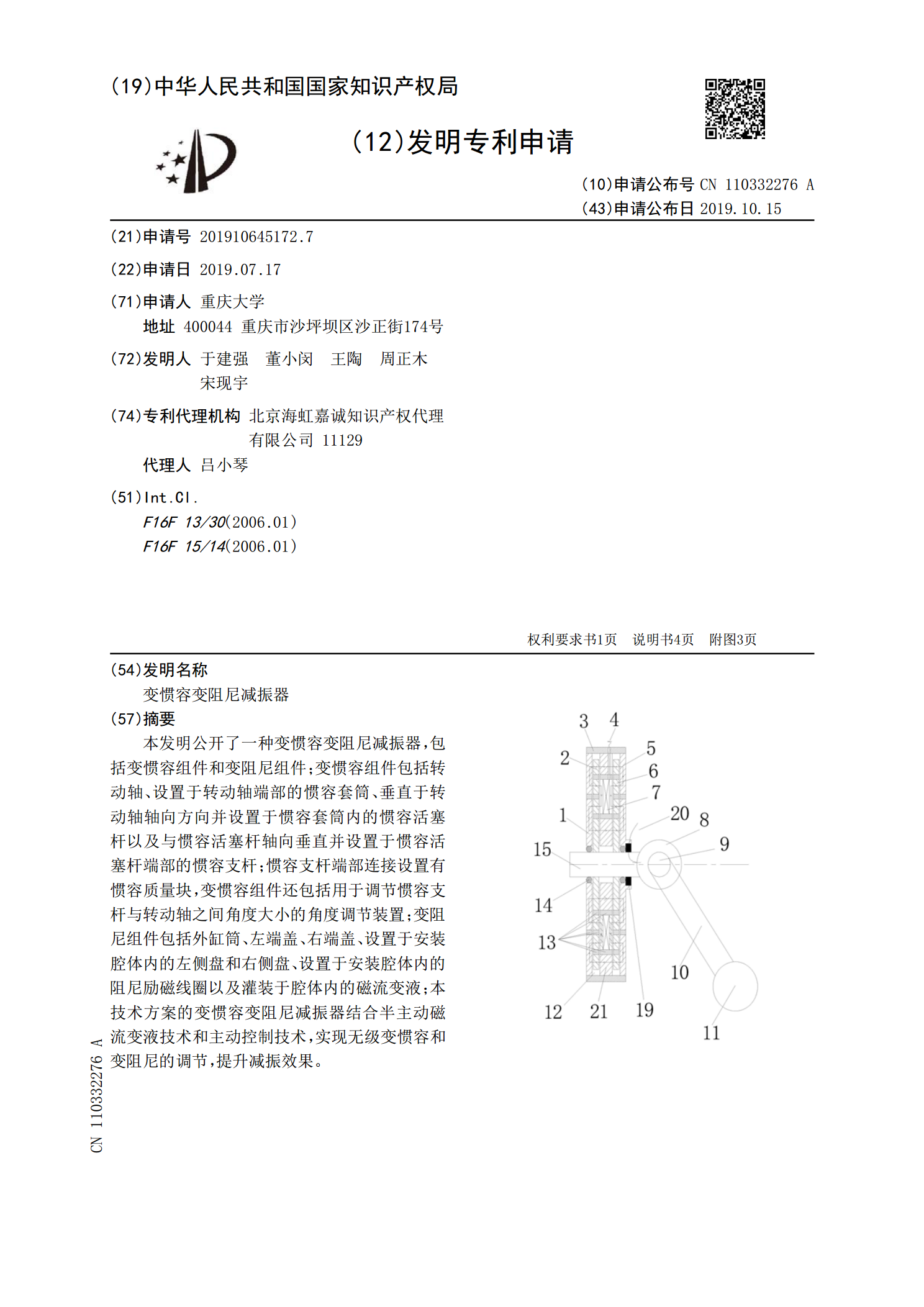
本发明公开了一种变惯容变阻尼减振器,包括变惯容组件和变阻尼组件;变惯容组件包括转动轴、设置于转动轴端部的惯容套筒、垂直于转动轴轴向方向并设置于惯容套筒内的惯容活塞杆以及与惯容活塞杆轴向垂直并设置于惯容活塞杆端部的惯容支杆;惯容支杆端部连接设置有惯容质量块,变惯容组件还包括用于调节惯容支杆与转动轴之间角度大小的角度调节装置;变阻尼组件包括外缸筒、左端盖、右端盖、设置于安装腔体内的左侧盘和右侧盘、设置于安装腔体内的阻尼励磁线圈以及灌装于腔体内的磁流变液;本技术方案的变惯容变阻尼减振器结合半主动磁流变液技术和主

基于性能需求的基础隔震结构附加调谐惯容阻尼器的优化设计研究.docx
基于性能需求的基础隔震结构附加调谐惯容阻尼器的优化设计研究论文题目:基于性能需求的基础隔震结构附加调谐惯容阻尼器的优化设计研究摘要:基础隔震结构作为一种有效降低建筑物地震响应的结构措施,在工程实践中得到了广泛应用。然而,传统的基础隔震结构往往不能满足复杂的工程环境要求,因此需要进行优化设计。本文研究了基于性能需求的基础隔震结构附加调谐惯容阻尼器的优化设计,探讨了其优势、设计原理和设计方法,并通过实例分析验证了该方法的有效性。关键词:基础隔震结构;调谐惯容阻尼器;优化设计;性能需求1.引言近年来,地震灾害频

基于互补滤波的惯导系统水平阻尼网络设计.docx
基于互补滤波的惯导系统水平阻尼网络设计基于互补滤波的惯导系统水平阻尼网络设计摘要:惯导系统是一种用于实时测量和跟踪运动状态的关键技术。在航空、航天、汽车以及机器人等领域,惯导系统被广泛应用。其中,水平阻尼网络在惯导系统中起到关键作用,用于抑制系统中产生的高频噪声和振动。本论文通过互补滤波的方法来设计惯导系统的水平阻尼网络,提高系统的稳定性和抗干扰能力。关键词:惯导系统,水平阻尼网络,互补滤波,稳定性,抗干扰能力1.引言惯导系统能够提供精确和实时的运动状态信息,对于实现精确的位置和姿态控制至关重要。然而,在