
基于IOCAD的无人机避障路径规划.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于IOCAD的无人机避障路径规划.docx
基于IOCAD的无人机避障路径规划基于IOCAD的无人机避障路径规划摘要:随着无人机技术的快速发展,无人机在各个领域中的应用不断增加。然而,无人机在复杂环境中进行自主飞行时面临着许多挑战,其中之一就是避免与障碍物碰撞。为了解决这一问题,本文提出了一种基于IOCAD的无人机避障路径规划方法。该方法通过将环境建模为三维场景,并使用基于IOCAD的算法进行路径生成,有效地避免了无人机与障碍物的碰撞。实验证明,该方法能够在保持飞行效率的同时,确保无人机的安全。1.引言无人机作为一种重要的航空器,正逐渐成为各个领域

基于Dubins路径的无人机避障规划算法.docx
基于Dubins路径的无人机避障规划算法基于Dubins路径的无人机避障规划算法摘要:无人机的广泛应用已经引起了许多研究人员的关注。无人机的避障规划算法是无人机安全飞行的关键。本文提出了一种基于Dubins路径的无人机避障规划算法,该算法可以在线生成可行路径,并避开动态和静态障碍物。实验结果表明,提出的算法在无人机避障任务中表现出良好的性能和准确性。1.引言无人机的快速发展和广泛应用引起了无人机避障问题的关注。无人机避障规划算法的目标是找到一条可行路径,使无人机能够安全地绕过静态和动态障碍物。近年来,许多

小车自动避障及路径规划.doc
第3章系统总体结构及工作原理该系统主要以超声波测距为基本测距原理,并在相应的硬件和软件的支持下,达到机器人避障的效果。机器人总体硬件设计传感器的分布要求为了全方位检测障物的分布状况,并及时为机器人系统提供全面的数据,可将所需的八个传感器均匀排列在机器人周围,相邻每对传感器互成45度角。为了避免相互干扰,八个传感器以程序运行周期为周期,进行循环测距。传感器排列示意图如下:d0d1d2d3d4d5d6d7图传感器分布图避障系统总体电路框架图设计红外传感器A/D转换单片机左侧电机超声波信号右侧电机LED显示LE
小车自动避障及路径规划.doc
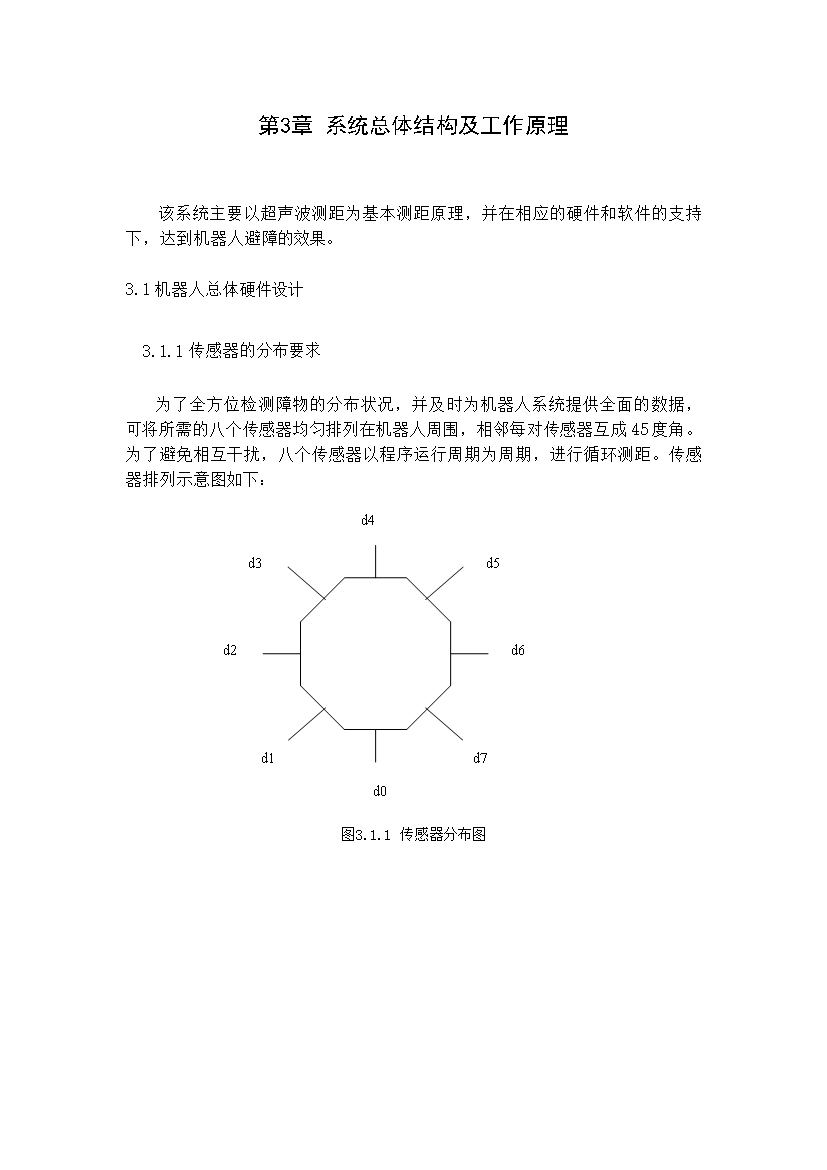
第3章系统总体结构及工作原理该系统主要以超声波测距为基本测距原理,并在相应的硬件和软件的支持下,达到机器人避障的效果。3.1机器人总体硬件设计3.1.1传感器的分布要求为了全方位检测障物的分布状况,并及时为机器人系统提供全面的数据,可将所需的八个传感器均匀排列在机器人周围,相邻每对传感器互成45度角。为了避免相互干扰,八个传感器以程序运行周期为周期,进行循环测距。传感器排列示意图如下:d0d1d2d3d4d5d6d7图3.1.1传感器分布图3.1.2避障系统总体电路框架图设计红外传感器A/D转换单片机左侧

小车自动避障及路径规划.doc
第3章系统总体结构及工作原理该系统主要以超声波测距为基本测距原理,并在相应的硬件和软件的支持下,达到机器人避障的效果。3.1机器人总体硬件设计3.1.1传感器的分布要求为了全方位检测障物的分布状况,并及时为机器人系统提供全面的数据,可将所需的八个传感器均匀排列在机器人周围,相邻每对传感器互成45度角。为了避免相互干扰,八个传感器以程序运行周期为周期,进行循环测距。传感器排列示意图如下:d0d1d2d3d4d5d6d7图3.1.1传感器分布图3.1.2避障系统总体电路框架图设计红外传感器A/D转换单片机左侧